基于Python实现种差值方法 课程报告+项目源码

目录
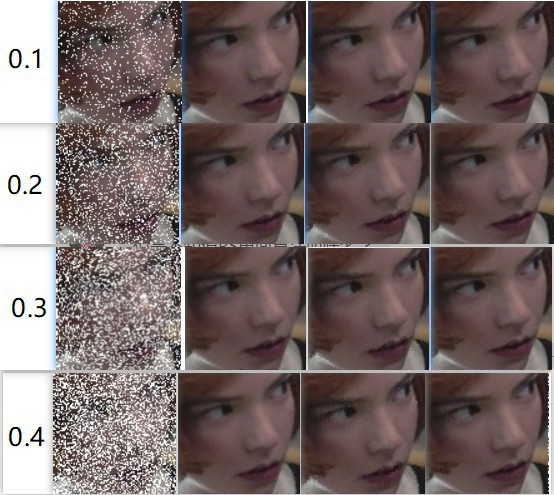
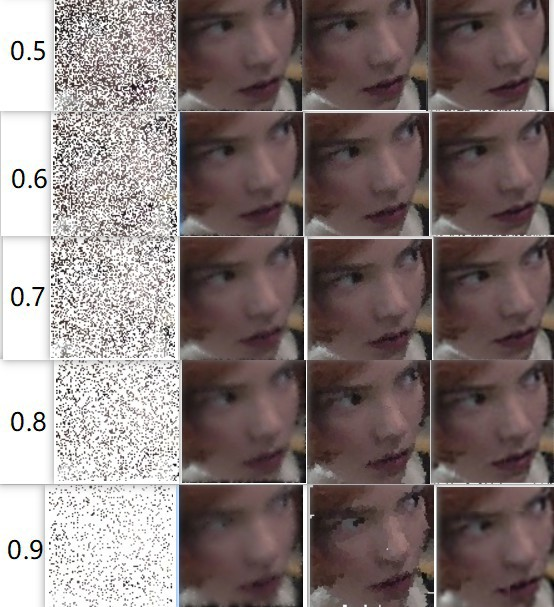
1.三种差值方法的实现与问题
三种插值方法都是使用Python自己实现的。
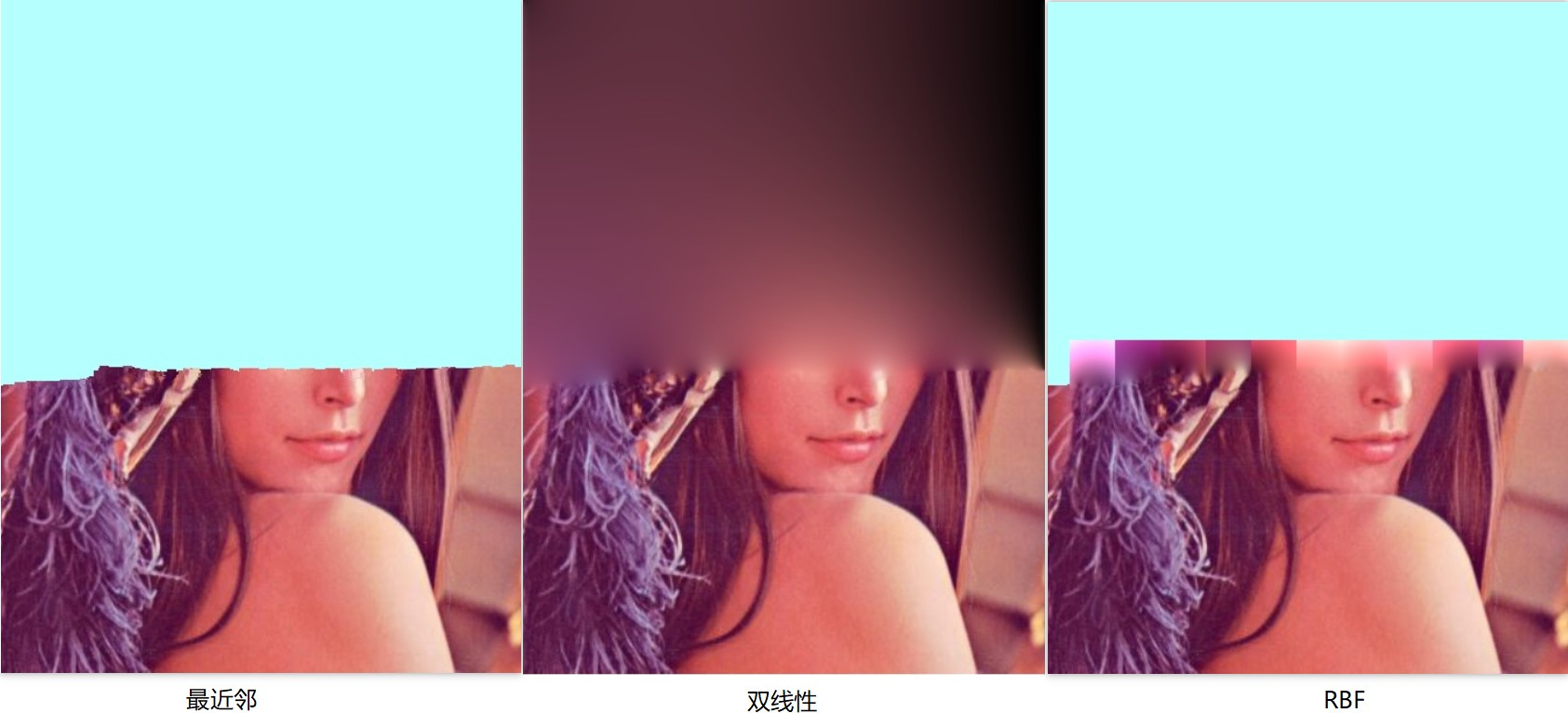
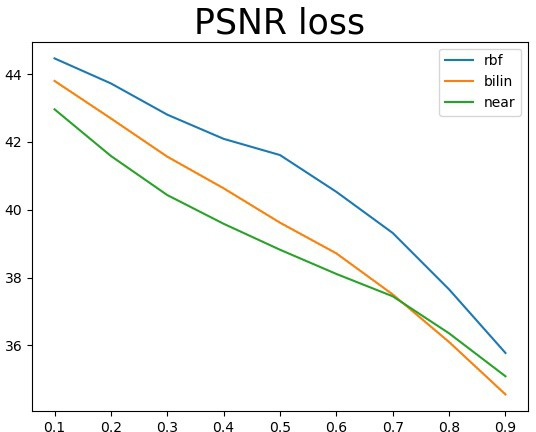
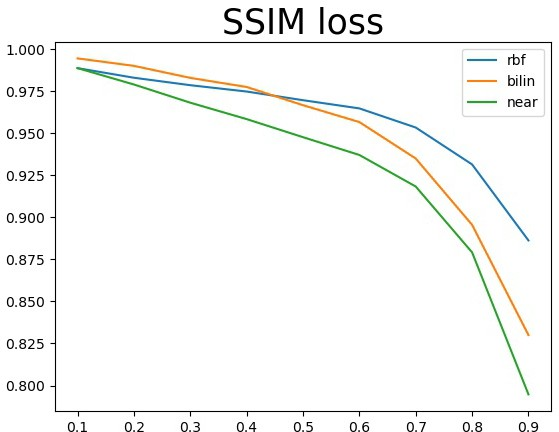
3.1 最近邻插值
寻找每个中心点周围的八个点中有无未丢失的点,如果有的话就赋值为第一个找到的点,如果没有就扩 大范围再次寻找,在最大范围内都找不到的话就跳过。
3.2 双线性插值


 使用解方程的方法求解,整体思路类似colorization作业的实现,每个点用周围的八个点线性表示,根据 距离为1
使用解方程的方法求解,整体思路类似colorization作业的实现,每个点用周围的八个点线性表示,根据 距离为1  确定两个权重。四个边界上的点只会由五个邻居来表示,每个权重为0.2,线性平均求和。 构建稀疏矩阵,求解 ,A为权重的稀疏矩阵,x为一个通道上的像素点值,b为原图中保留的像素 点的值。
确定两个权重。四个边界上的点只会由五个邻居来表示,每个权重为0.2,线性平均求和。 构建稀疏矩阵,求解 ,A为权重的稀疏矩阵,x为一个通道上的像素点值,b为原图中保留的像素 点的值。
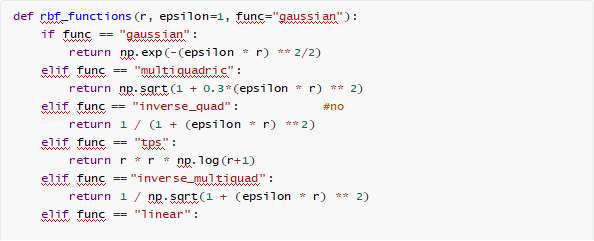
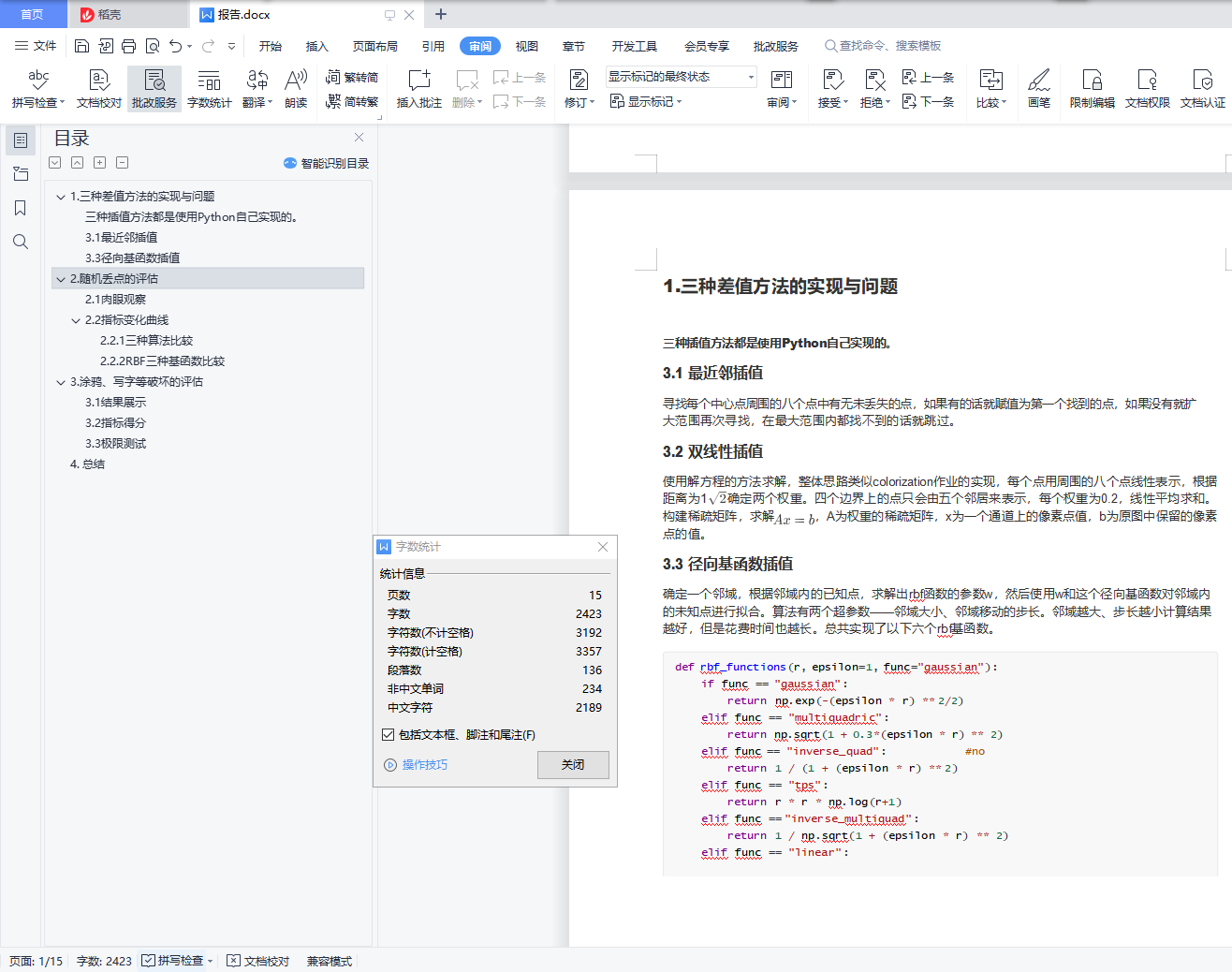
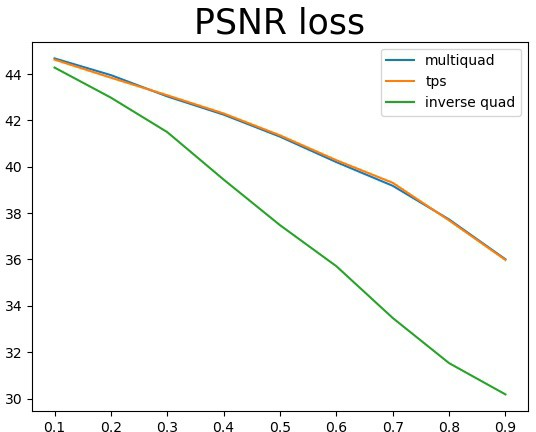
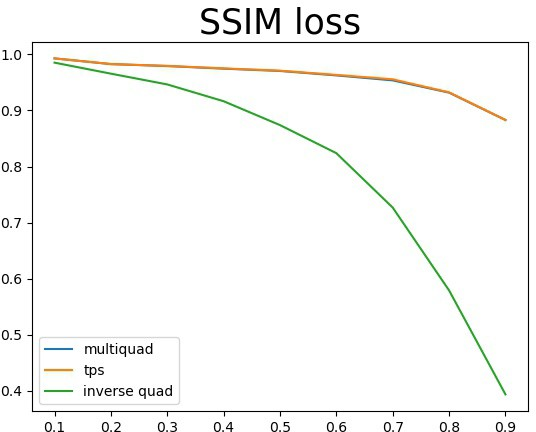
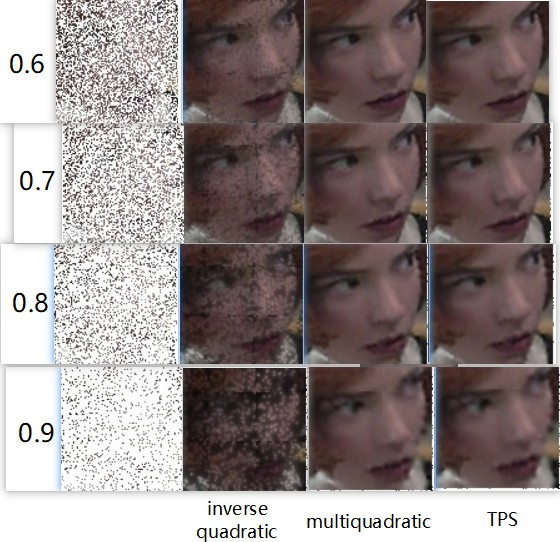
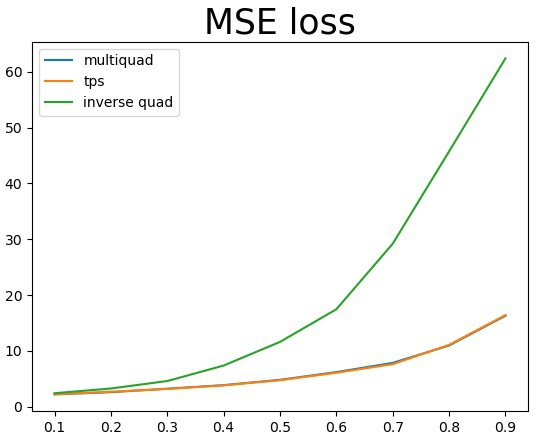
3.3 径向基函数插值
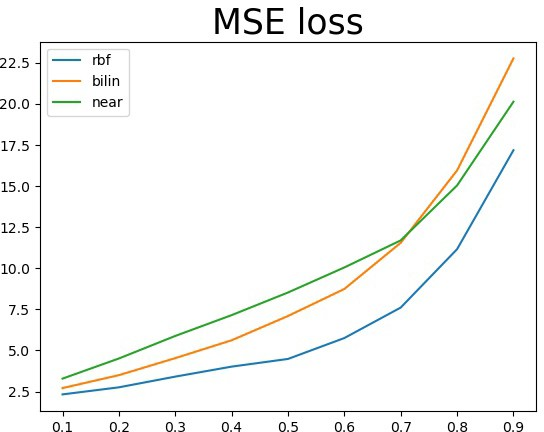
确定一个邻域,根据邻域内的已知点,求解出rbf函数的参数w,然后使用w和这个径向基函数对邻域内 的未知点进行拟合。算法有两个超参数――邻域大小、邻域移动的步长。邻域越大、步长越小计算结果 越好,但是花费时间也越长。总共实现了以下六个rbf基函数。