基于卫星无源探测的空间飞行器主动段轨道估计与误差分析22 毕业论文+源码

题 目 基于卫星无源探测的空间飞行器
主动段轨道估计与误差分析

摘 要:
论文研究了基于卫星无源探测的空间飞行器主动段的轨道估计与误差分析问题。针对这一特定的非线性滤波问题,论文主要采用探索性算法思想进行最优解的全局搜索,得到了较为理想的状态估计值和残差结果。
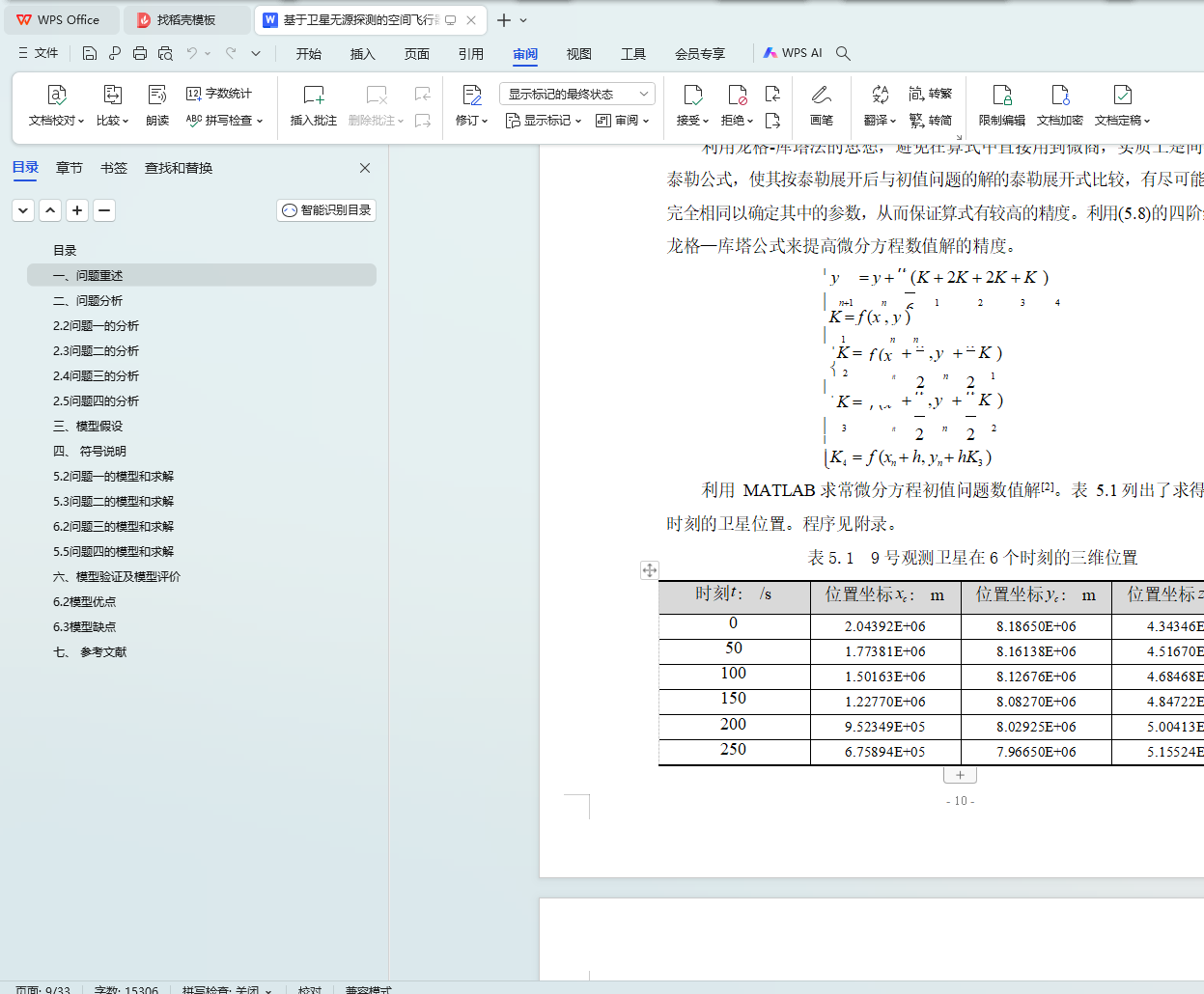
针对问题一,采用龙格-库塔法,利用 MATLAB 编程实现了常微分方程数值解,得到各时刻卫星的三维位置坐标。

 针对问题二,首先基于问题一各卫星不同时刻的计算结果,采用三次样条插值函数完成对观测数据的时间对齐;然后就双星对目标交叉定位观测数据的空间结构进行分析,按照逐点交汇定位思路建立一个超定线性方程组,求该超定方程组的最小二乘解,完成 06 与 09 号卫星对 0 号空间飞行器的逐点定位, 并对结果数据的异常值进行了分析。通过选取适当的vr (t) 和m(t) 的模型形式, 将空间飞行器的运动方程转化为差分形式后,利用多项式拟合得到vr (t) 和m(t) 的参数。最后以估计残差最小为优化目标,利用遗传算法求出最优的初值,从而求出 0 号空间飞行器的理论三维位置坐标和速度,与逐点交汇定位结果比较, 得到估计残差(标准差)为28.9311。
针对问题二,首先基于问题一各卫星不同时刻的计算结果,采用三次样条插值函数完成对观测数据的时间对齐;然后就双星对目标交叉定位观测数据的空间结构进行分析,按照逐点交汇定位思路建立一个超定线性方程组,求该超定方程组的最小二乘解,完成 06 与 09 号卫星对 0 号空间飞行器的逐点定位, 并对结果数据的异常值进行了分析。通过选取适当的vr (t) 和m(t) 的模型形式, 将空间飞行器的运动方程转化为差分形式后,利用多项式拟合得到vr (t) 和m(t) 的参数。最后以估计残差最小为优化目标,利用遗传算法求出最优的初值,从而求出 0 号空间飞行器的理论三维位置坐标和速度,与逐点交汇定位结果比较, 得到估计残差(标准差)为28.9311。
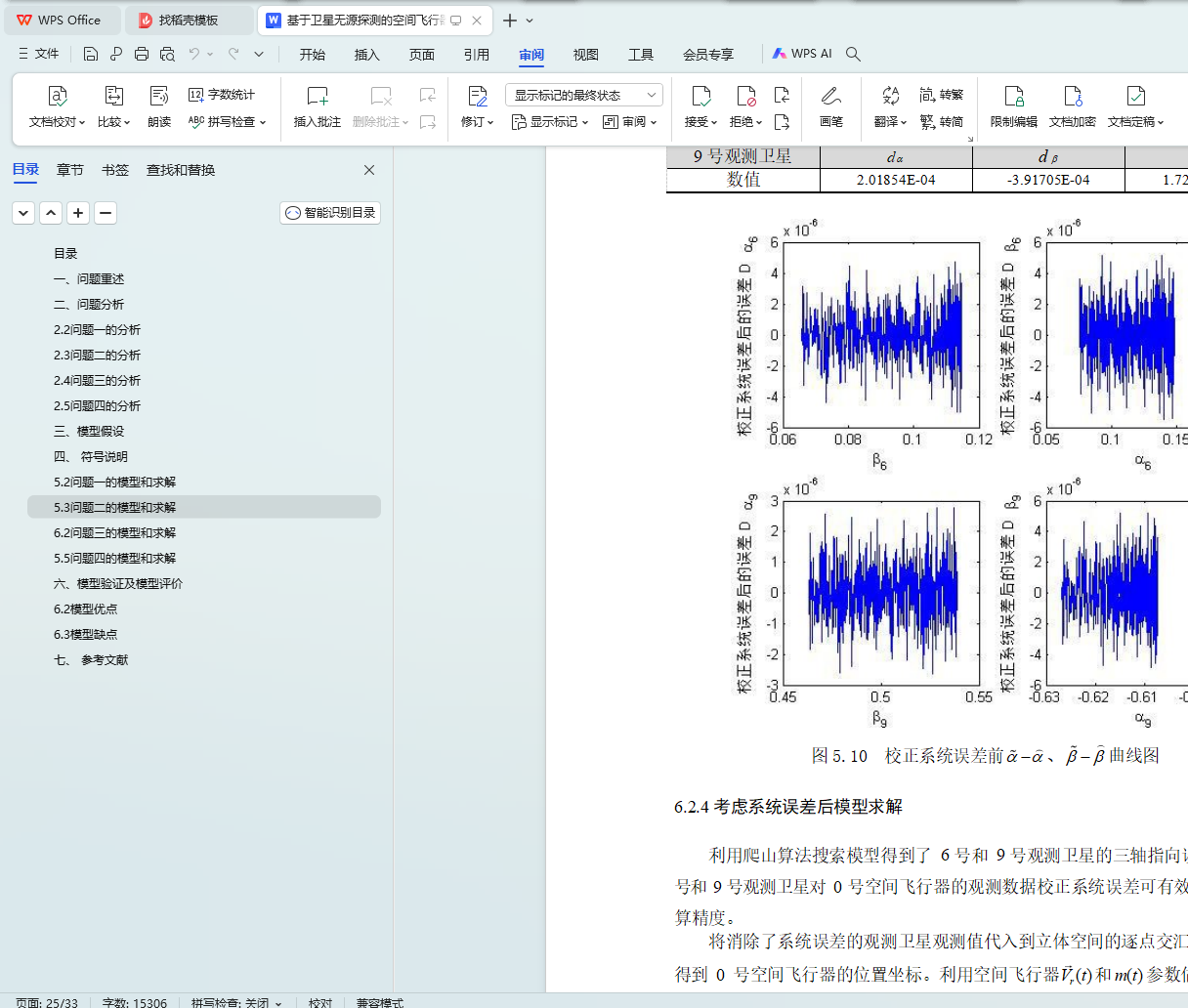
针对问题三,在考虑观测卫星的系统误差时,利用双星多点观测数据联立求解目标位置参数和系统误差参数,论文采用启发式搜索算法进行系统误差和轨道估计,分别计算出 6 号卫星的三轴指向误差为-4.845´10-4 , -7.872´10-4 ,
-2.394´10-4 ,9 号观测卫星的三轴指向误差分别 2.019´ 10-4 -3.917´ 10-4 ,
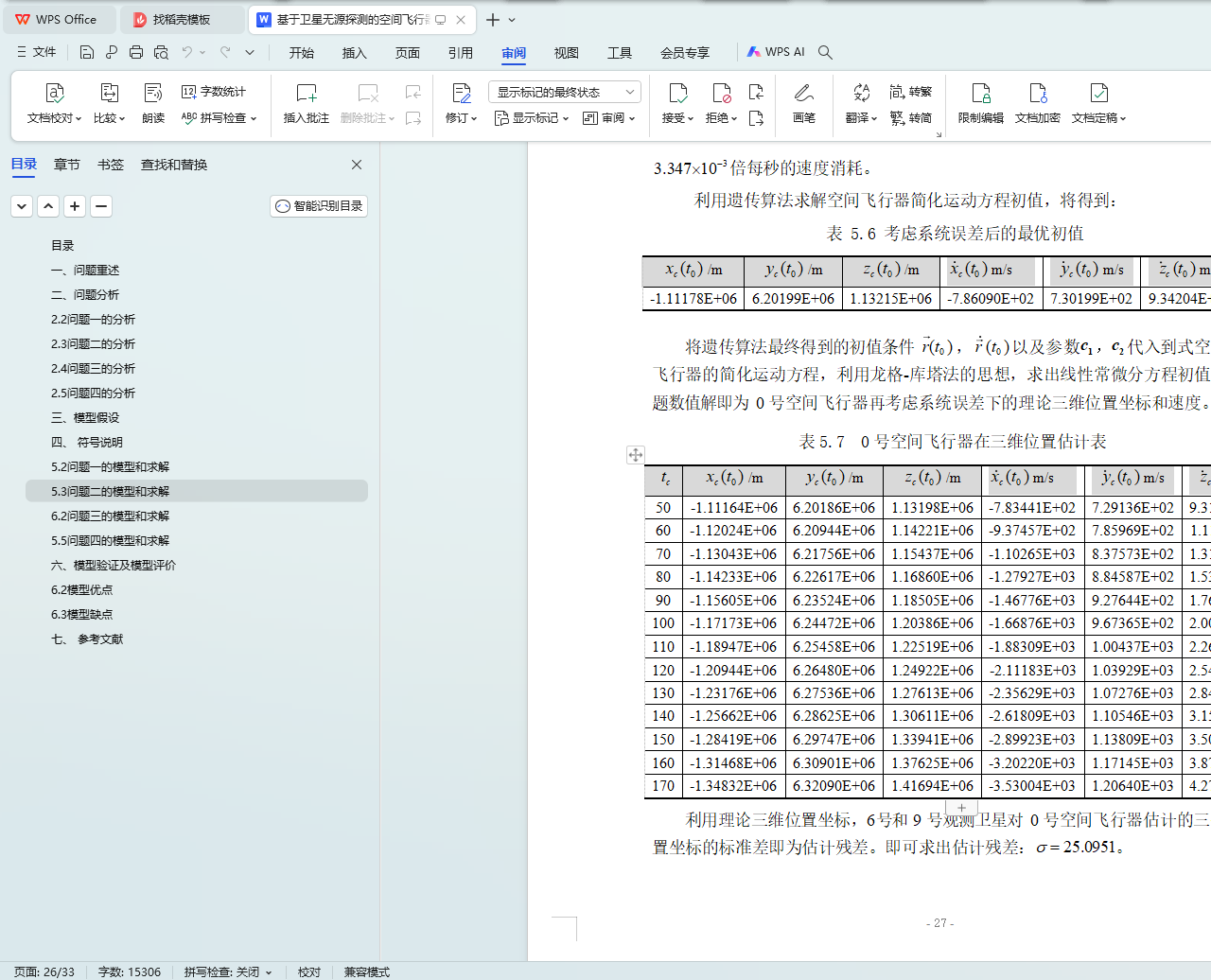
1.729´10-4 ;利用修正系统误差后的观测数据再次对模型参数进行辨识和轨道参数计算,得到估计残差25.0951。
针对问题四,基于单颗卫星每时刻提供的两个观测数据ak 、bk ,在消除系
统误差的前提下,假定目标运动方程是三次样条,通过单星连续 8 个点的测量
信息,通过 16 个联立方程的求解,完成模型参数的辨识即对轨道参数的确立。在设计算法时,仍采用具有启发式的遗传算法完成最优解的寻优。最后对多星观测数据进行信息融合实现目标状态估计和系统误差解算的思想进行了讨论。
 最后,论文设计了专门的模型验证环节以对本文构建的模型和提出的算法的合理性、有效性进行检验。设定一组空间飞行器的初始值以及vr (t) 和m(t) 参数,计算出目标飞行状态的理论真值,基于题干中所提供的卫星位置参数,可以得到卫星在采样点与目标的空间位置关系,计算出观察值的理论真值,再叠加上白噪声和系统误差,得到了一组观测数据。基于该组观测数据再利用本文所建模型和算法完成目标的状态估计,与理论真值进行比较以验证模型和算法的有效性。
最后,论文设计了专门的模型验证环节以对本文构建的模型和提出的算法的合理性、有效性进行检验。设定一组空间飞行器的初始值以及vr (t) 和m(t) 参数,计算出目标飞行状态的理论真值,基于题干中所提供的卫星位置参数,可以得到卫星在采样点与目标的空间位置关系,计算出观察值的理论真值,再叠加上白噪声和系统误差,得到了一组观测数据。基于该组观测数据再利用本文所建模型和算法完成目标的状态估计,与理论真值进行比较以验证模型和算法的有效性。
关键词:坐标系转换,逐点交汇定位,轨道估计,遗传算法,残差估计,误差分析,搜索算法,模型验证
目录
5.1 空间飞行器主动段运动方程的推导....................................................... - 9 -
5.2 问题一的模型和求解............................................................................ - 10 -
5.3 问题二的模型和求解............................................................................ - 11 -
5.3.1 基于三次样条插值的时间对齐................................................... - 11 -
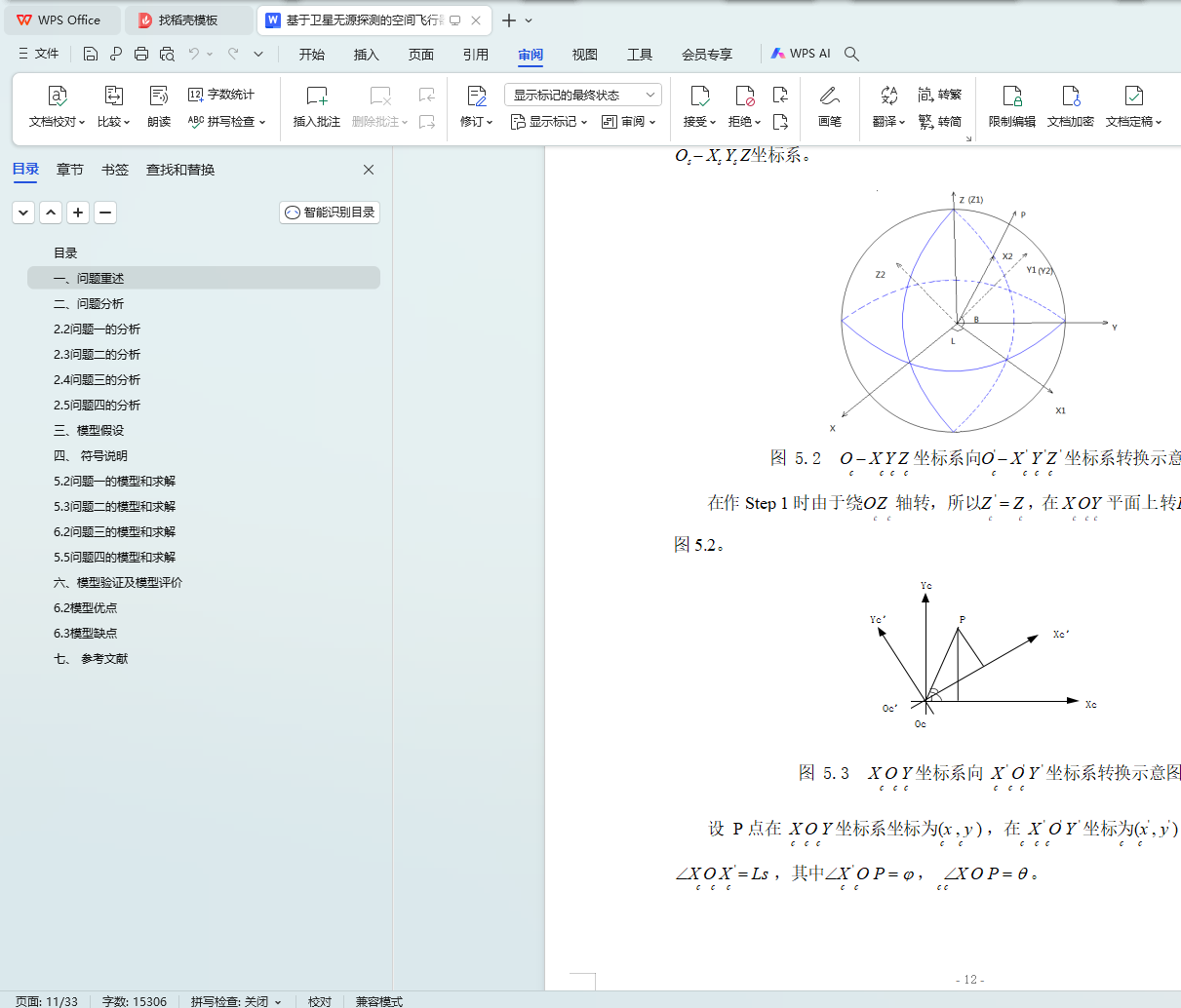
5.3.2 基础坐标系与观测坐标系的转换............................................... - 11 -
5.3.3 双星对目标交叉观测时空间位置结构分析 ............................... - 13 -
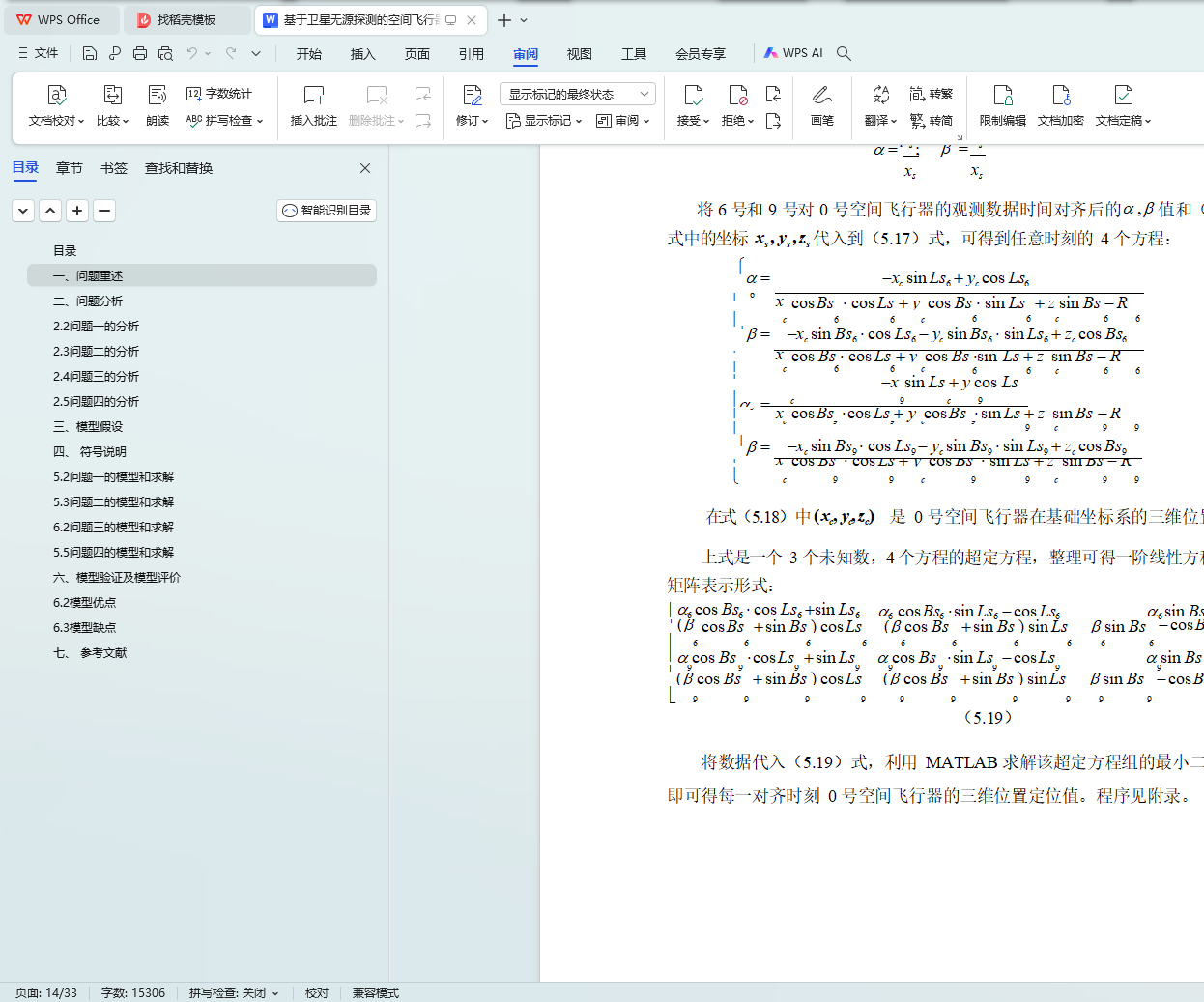
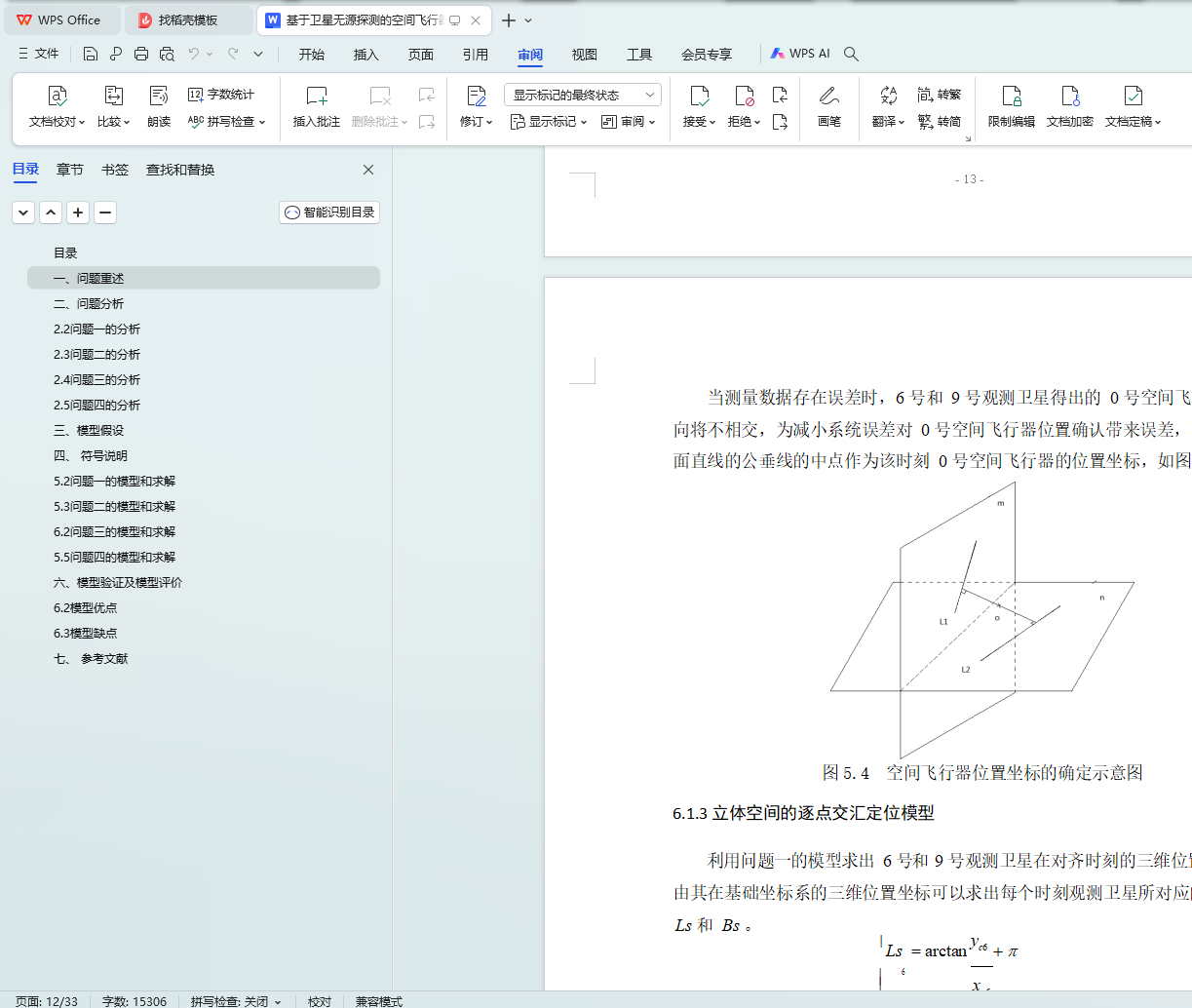
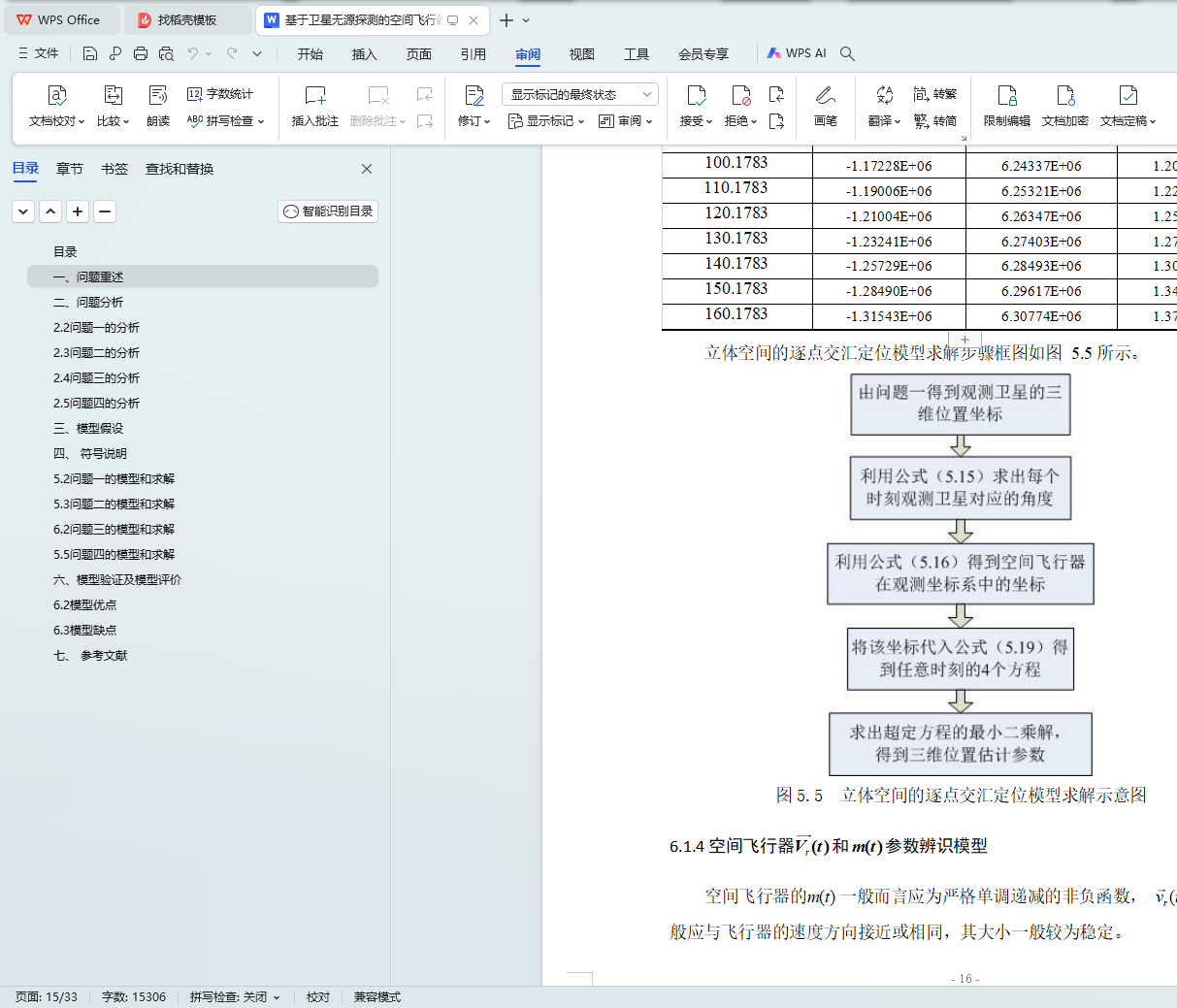
 5.3.4 立体空间的逐点交汇定位模型................................................... - 14 -
5.3.4 立体空间的逐点交汇定位模型................................................... - 14 -
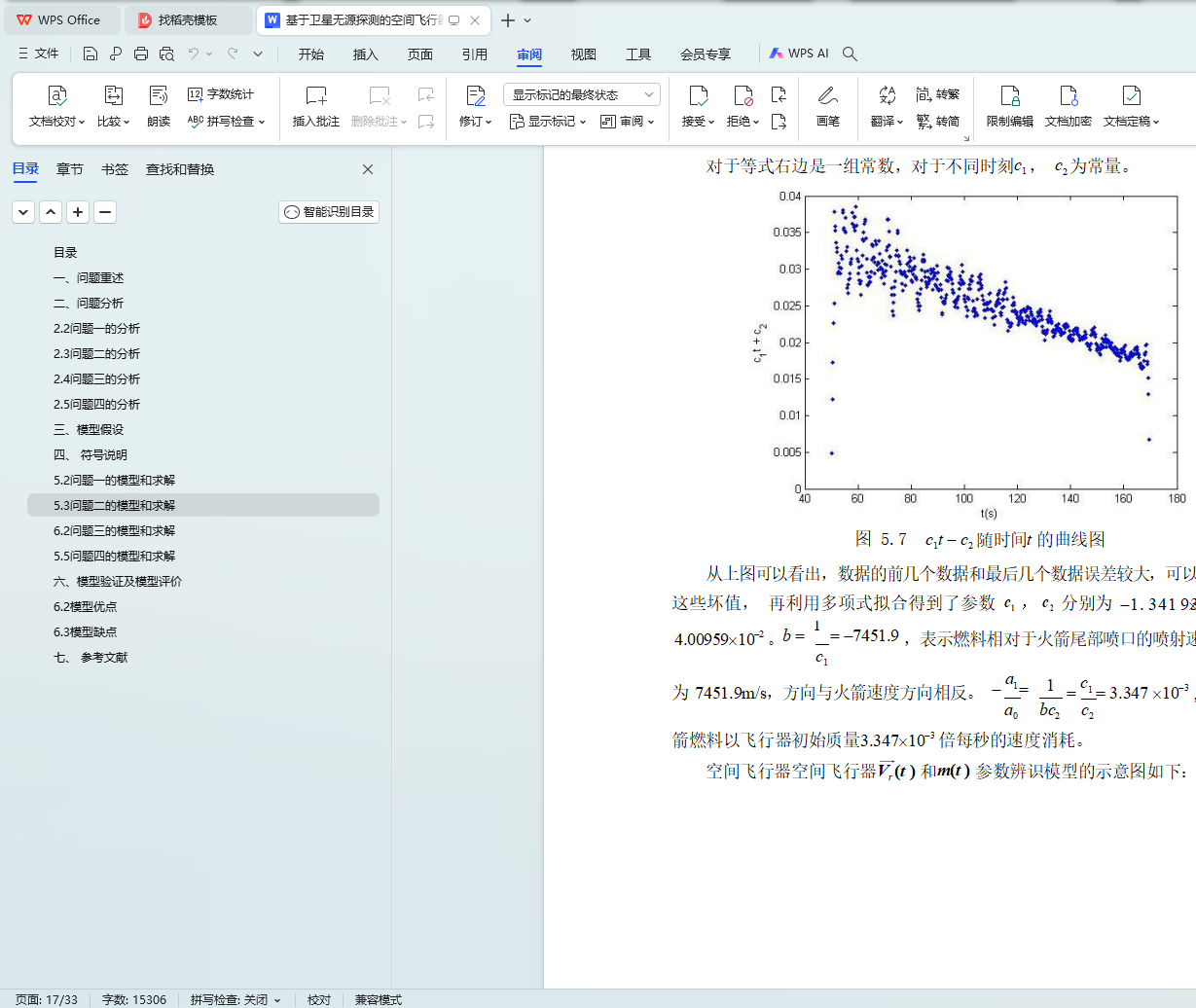
5.3.5 空间飞行器Vr (t ) 和m(t ) 参数辨识模型 ..................................... - 16 -
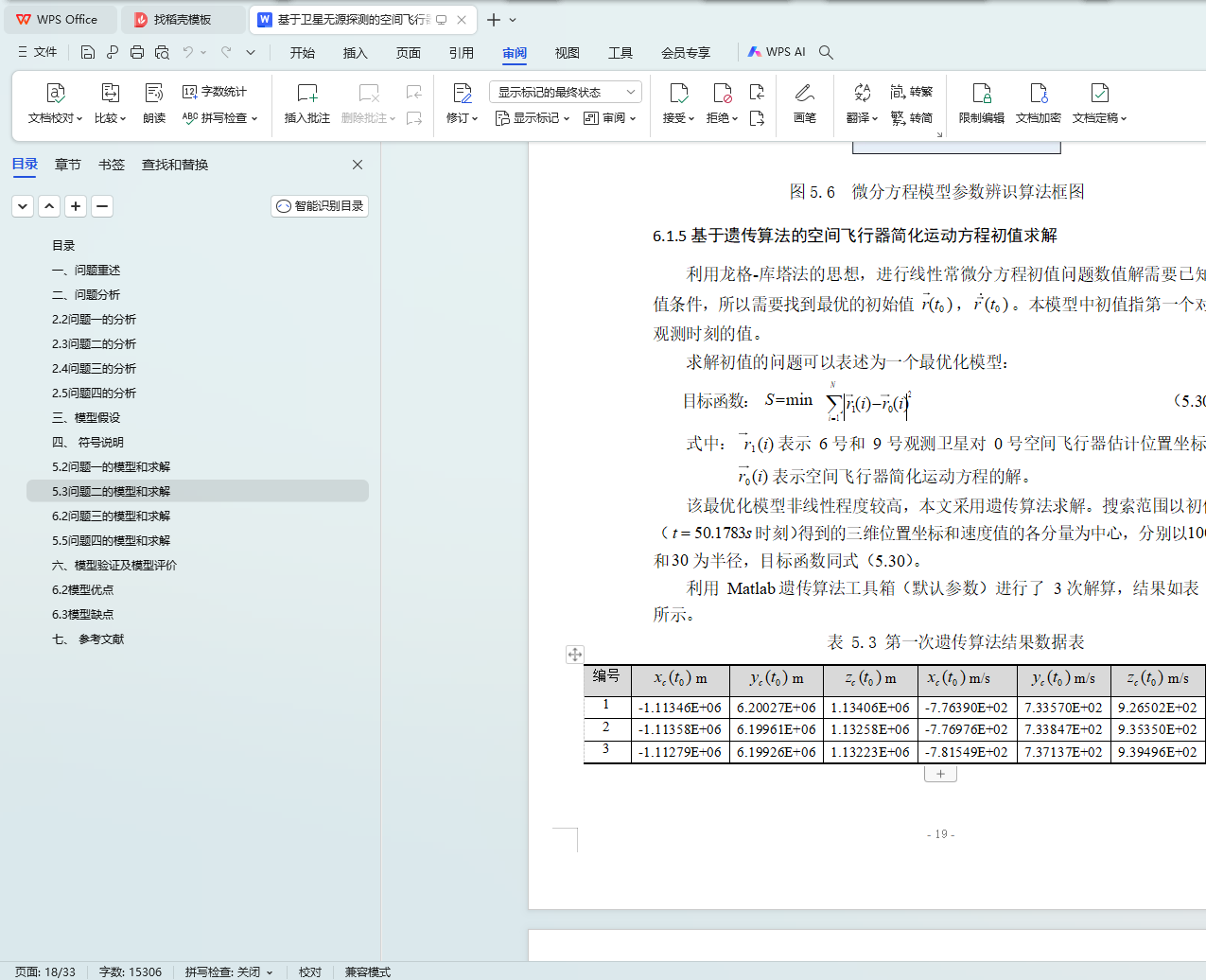
5.3.6 基于遗传算法的空间飞行器简化运动方程初值求解................ - 19 -
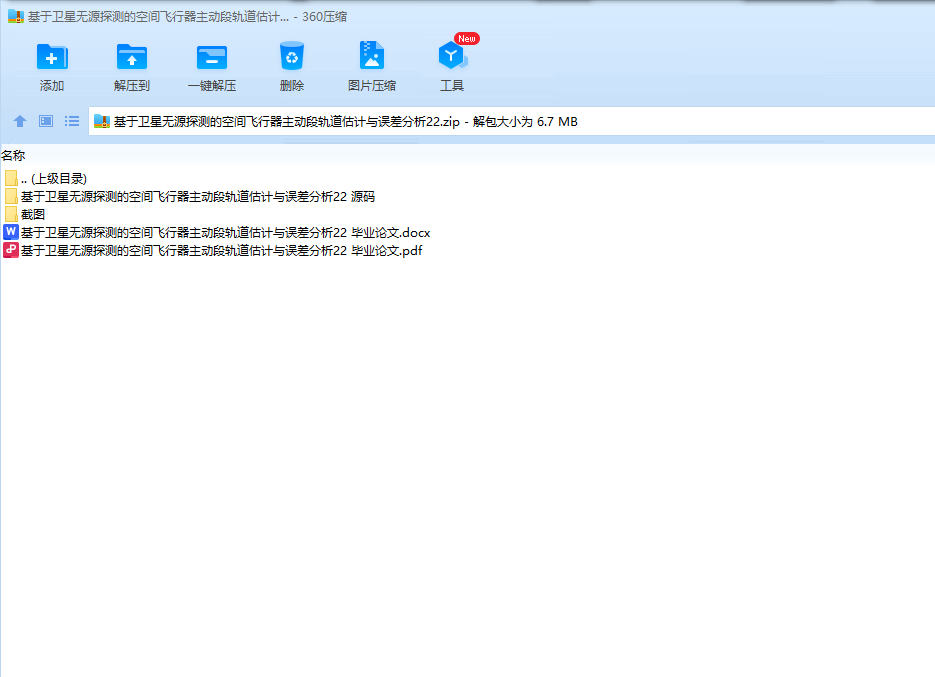
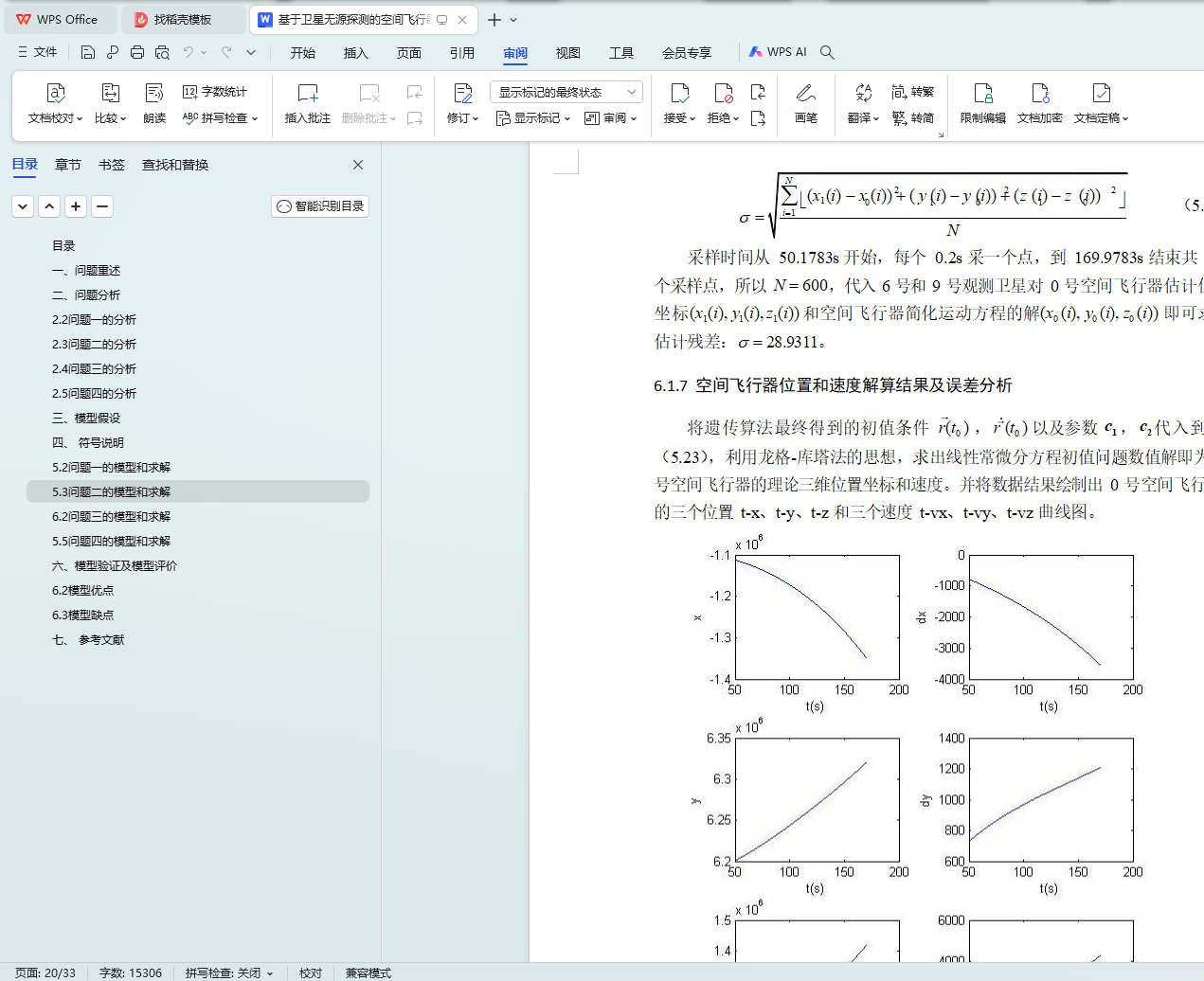
5.3.8 空间飞行器位置和速度解算结果及误差分析............................ - 21 -
5.4 问题三的模型和求解............................................................................ - 22 -
5.4.1 逐点交汇定位估计系统误差的不可行性 ................................... - 22 -
5.4.2 考虑系统误差时目标状态估计思路分析 ................................... - 22 -
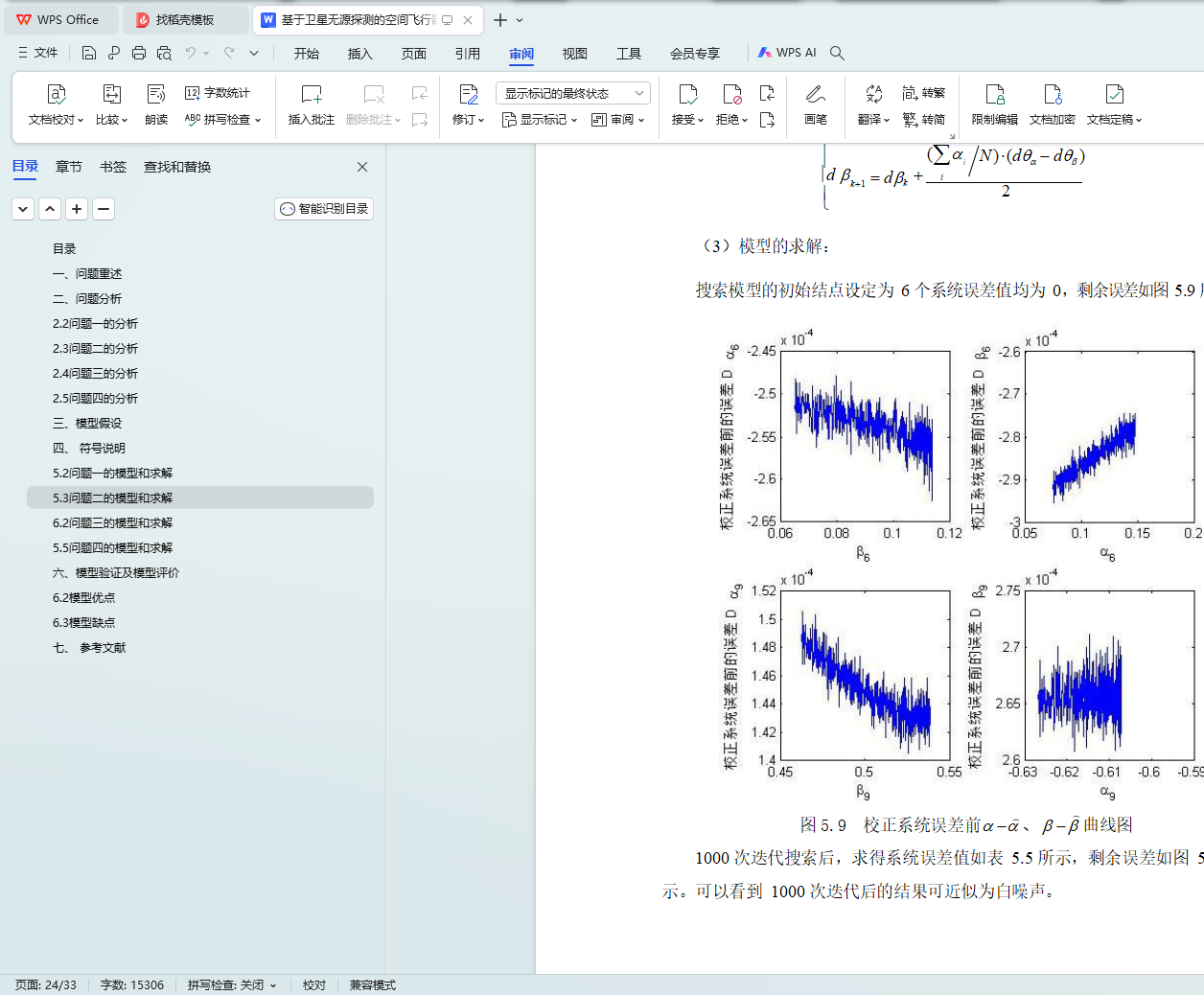
5.4.3 求解系统误差的爬山算法搜索模型........................................... - 23 -
5.4.4 考虑系统误差后模型求解 .......................................................... - 26 -
5.5 问题四的模型和求解............................................................................ - 28 -
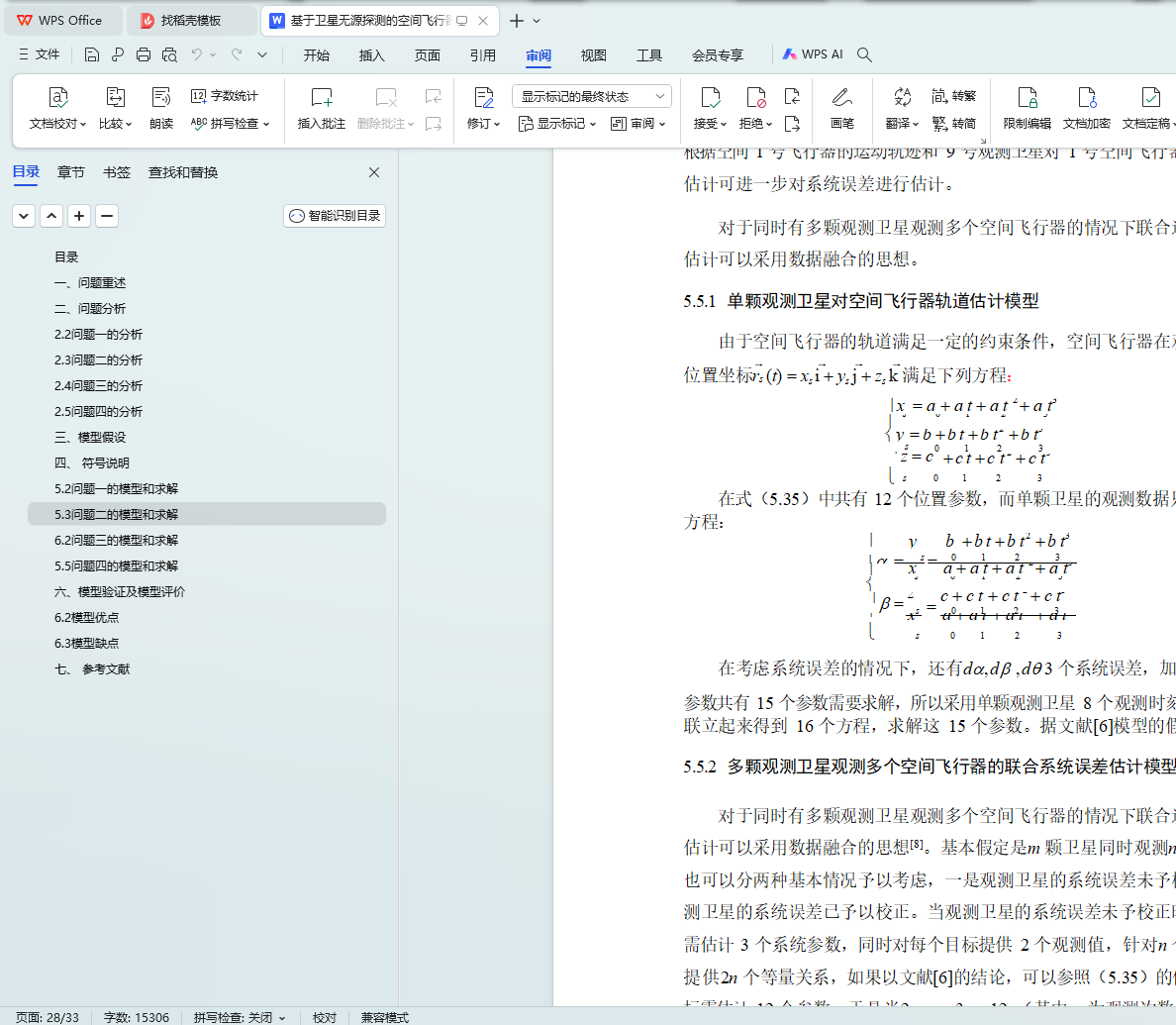
5.5.1 单颗观测卫星对空间飞行器轨道估计模型 ............................... - 29 -
5.5.2 多颗观测卫星观测多个空间飞行器的联合系统误差估计模型. - 29 -
六、模型验证及模型评价 ................................................................................. - 30 -