基于单片机的搬运机器人设计 说明书(论文)+代码+仿真工程

摘 要
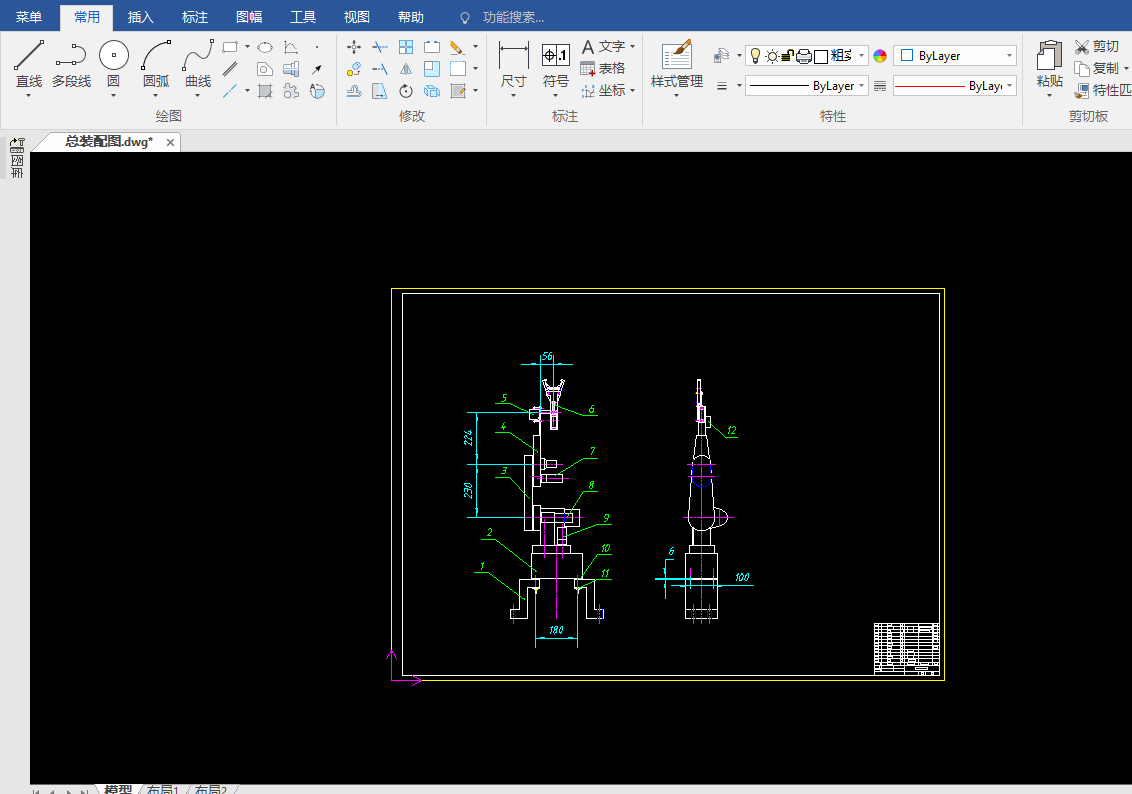
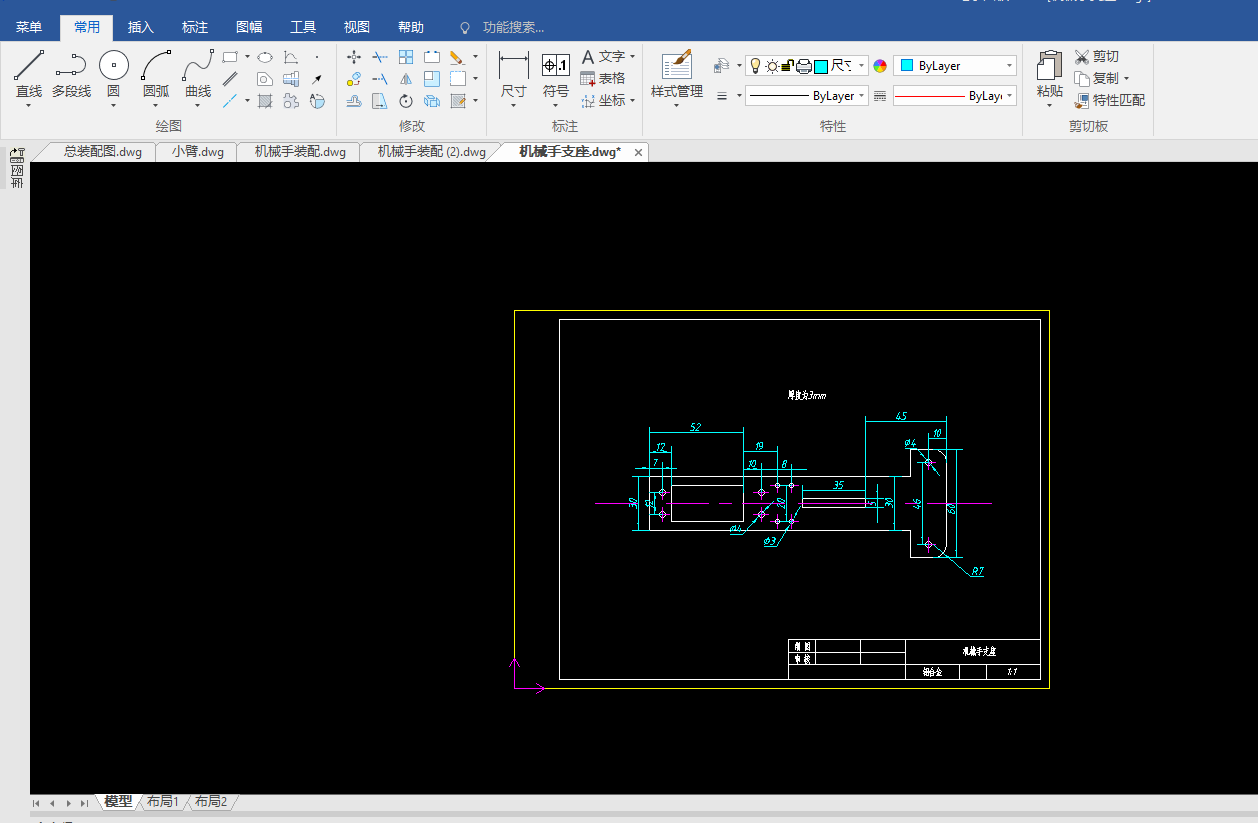
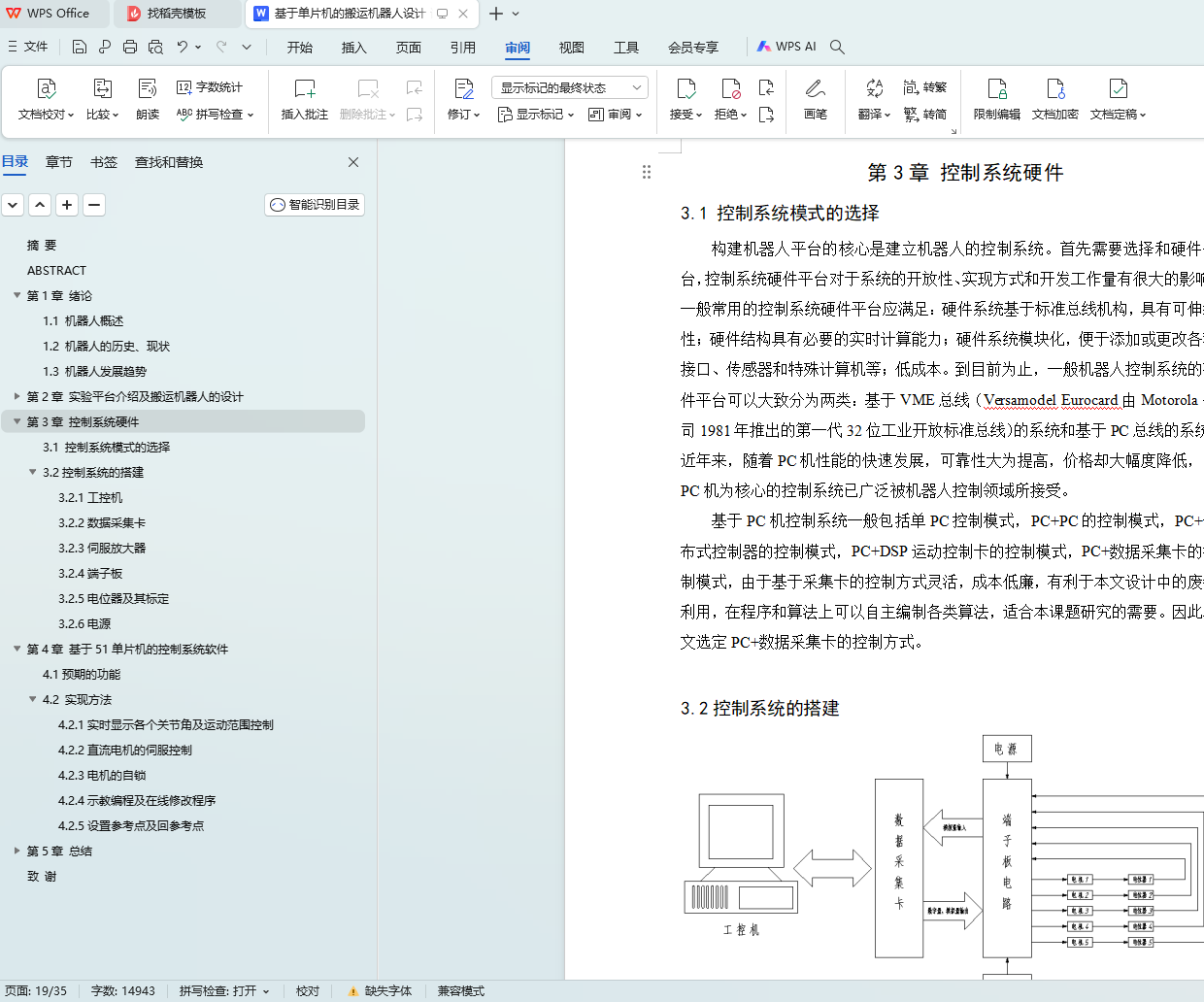
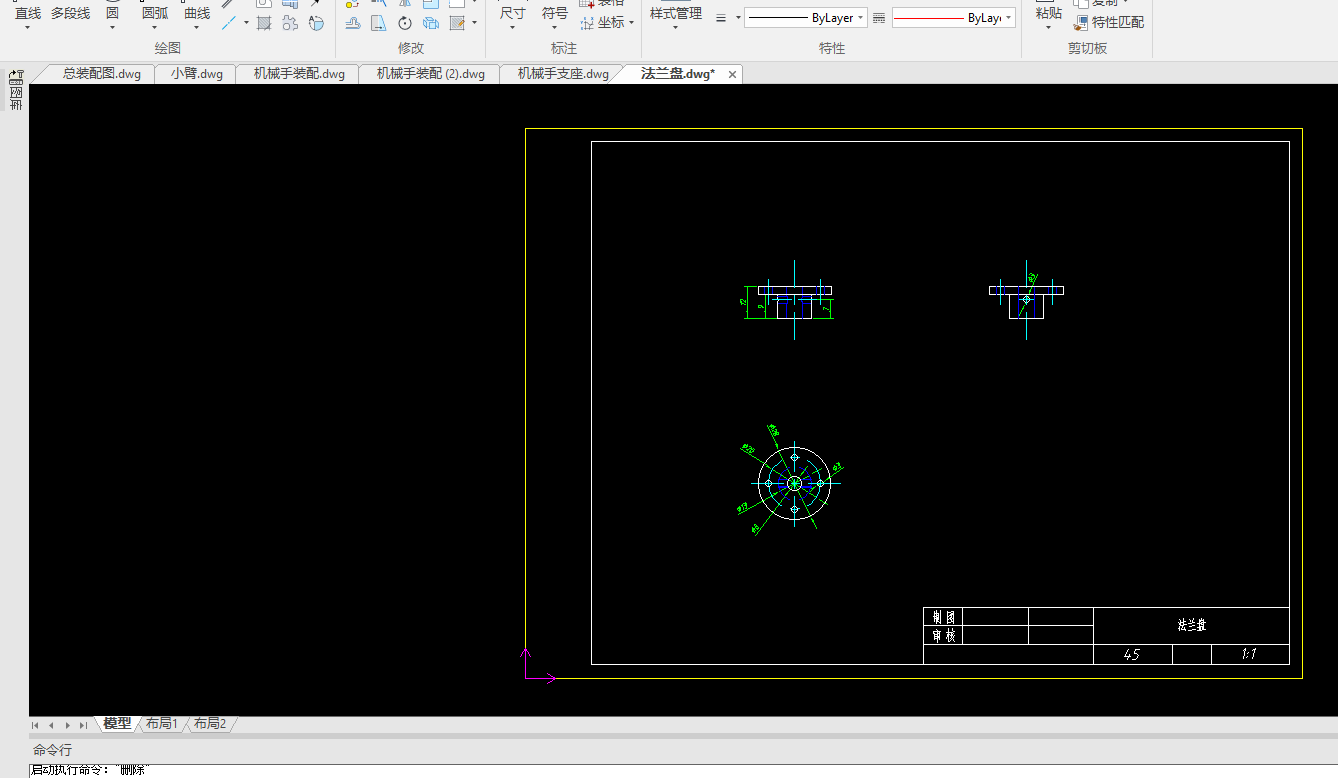
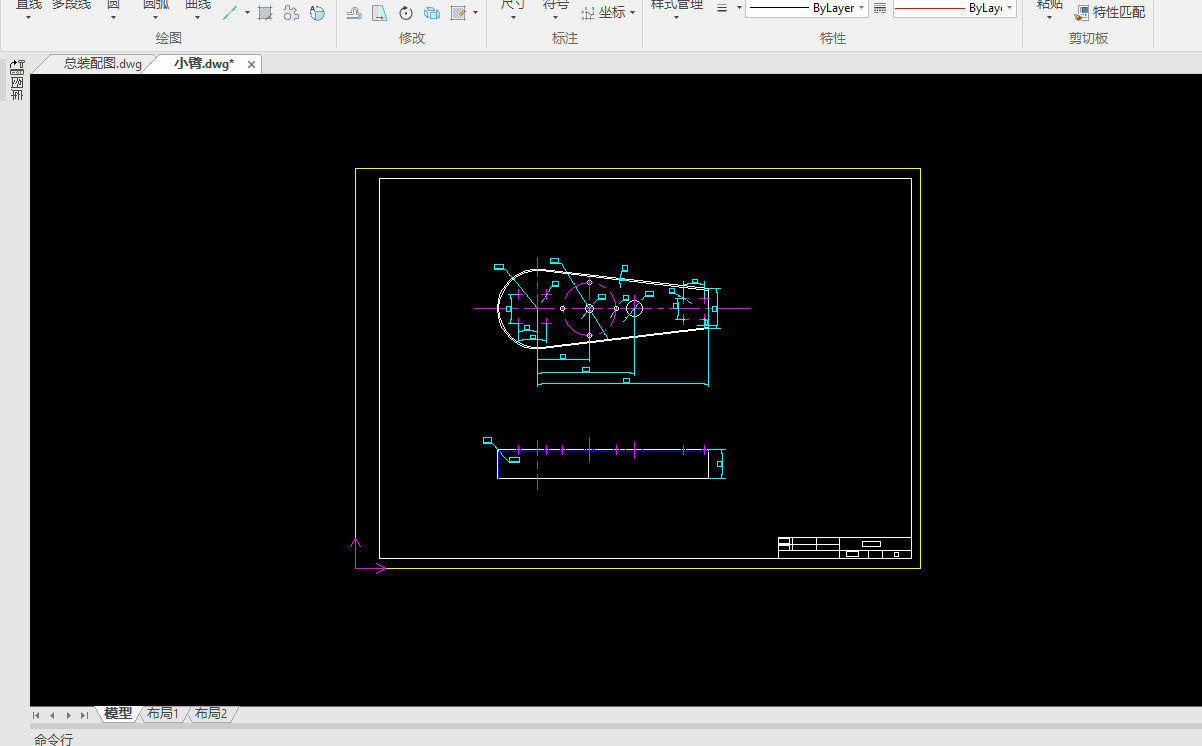
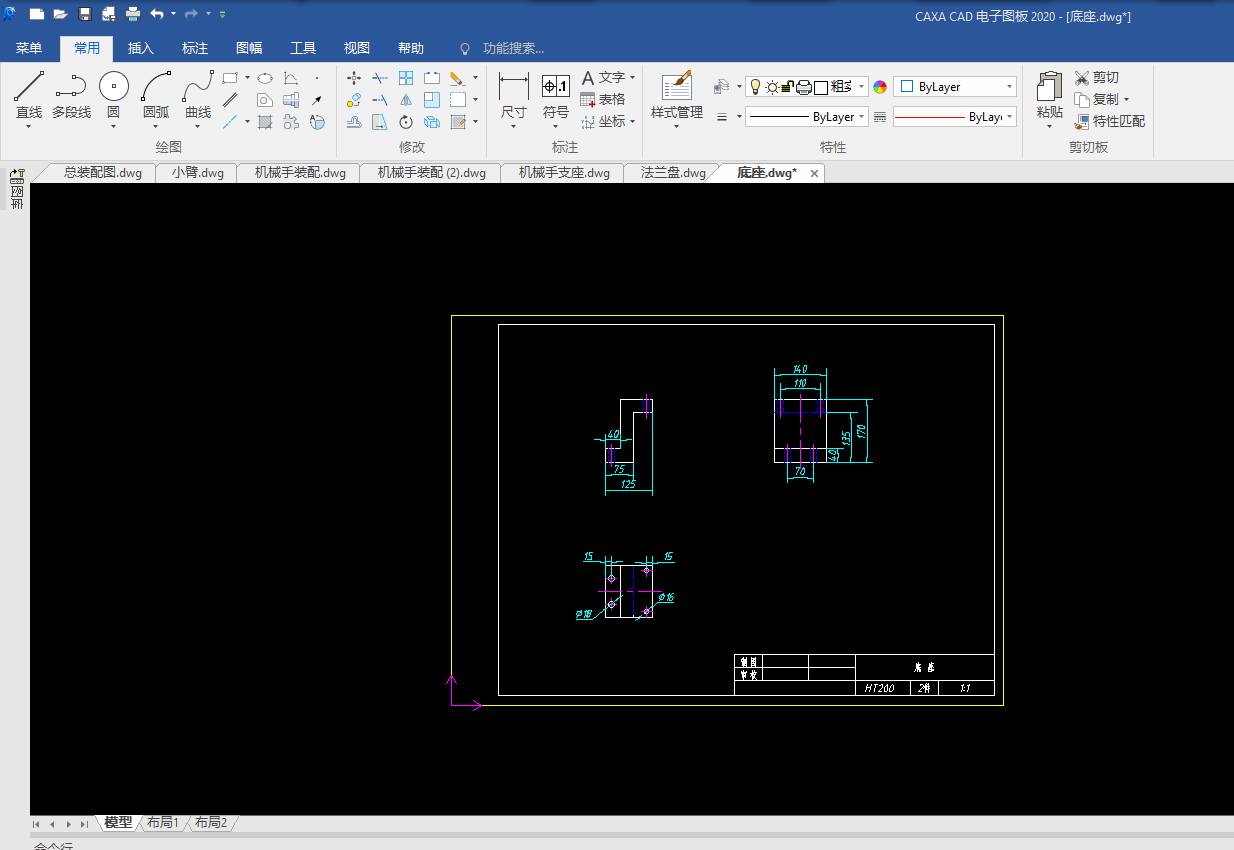
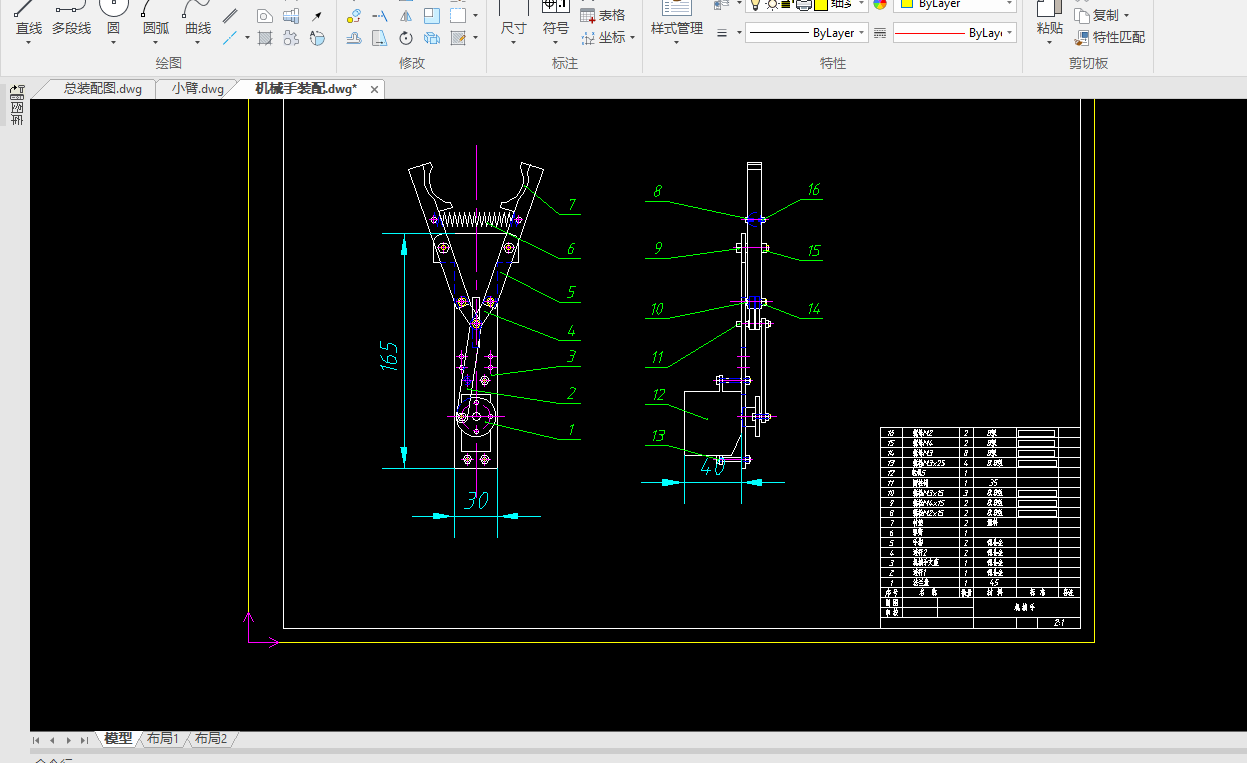
本文旨在设计一款基于51单片机的搬运机器人,通过对其硬件结构、控制系统及运动机制的深入研究,实现了机器人的精确搬运功能。首先,本文详细阐述了搬运机器人的整体设计方案,包括机械结构、驱动系统以及单片机控制系统的设计。其中,机械结构部分通过CAD软件绘制了详细的图纸,确保了机器人结构的合理性及稳定性。在控制系统设计方面,采用了51单片机作为核心控制器,通过编程实现对机器人运动轨迹的精确控制。此外,本文还分析了搬运机器人在实际应用中可能遇到的问题,并提出了相应的优化措施。实验结果表明,该搬运机器人具有良好的运动性能和搬运精度,能够满足多种搬运需求。本研究不仅为搬运机器人的设计提供了有益的参考,也为相关领域的进一步研究奠定了基础。
关键词:51单片机;搬运机器人;CAD图纸;控制系统;运动机制;精确搬运;优化设计
ABSTRACT
This paper aims to design a handling robot based on 51 through the thorough research of the hardware structure and control system and motion mechanism. First, this paper details the overall design scheme of handling robot, including mechanical structure, drive system and SU control system. Among them, the mechanical structure through CAD software to ensure the rationality and stability of the robot structure. In the design of the control system, the 51 single-chip microcontroller is used as the core controller to accurately control the movement trajectory of the robot through programming. Moreover, this paper analyzes the possible problems in the practical application of handling robot and proposes corresponding optimization measures. The experimental results show that the handling robot has good motion performance and handling accuracy, and can meet various handling requirements. This study not only provides a useful reference for the design of handling robots, but also lays a foundation for further research in related fields.
Key words: 51 SU; handling robot; CAD drawing; control system; motion mechanism; precision handling; and optimization design
目录