智能机器人的设计与制造 说明书(论文)+任务书+开题报告+cad图纸+sw三维图纸+运动仿真视频

目录
摘要
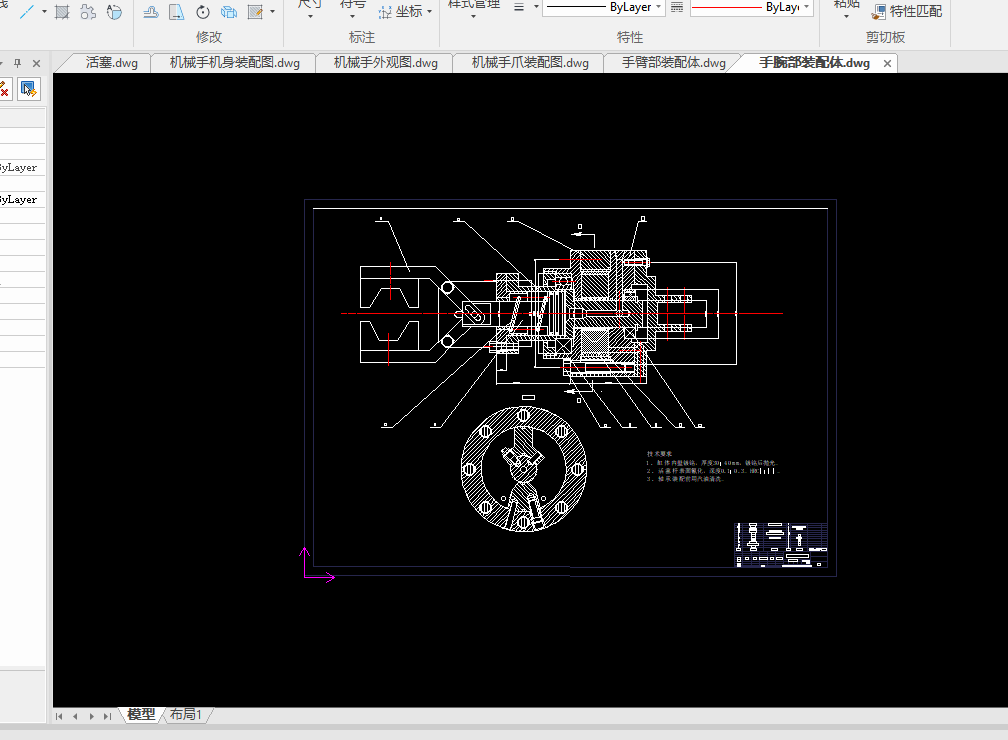
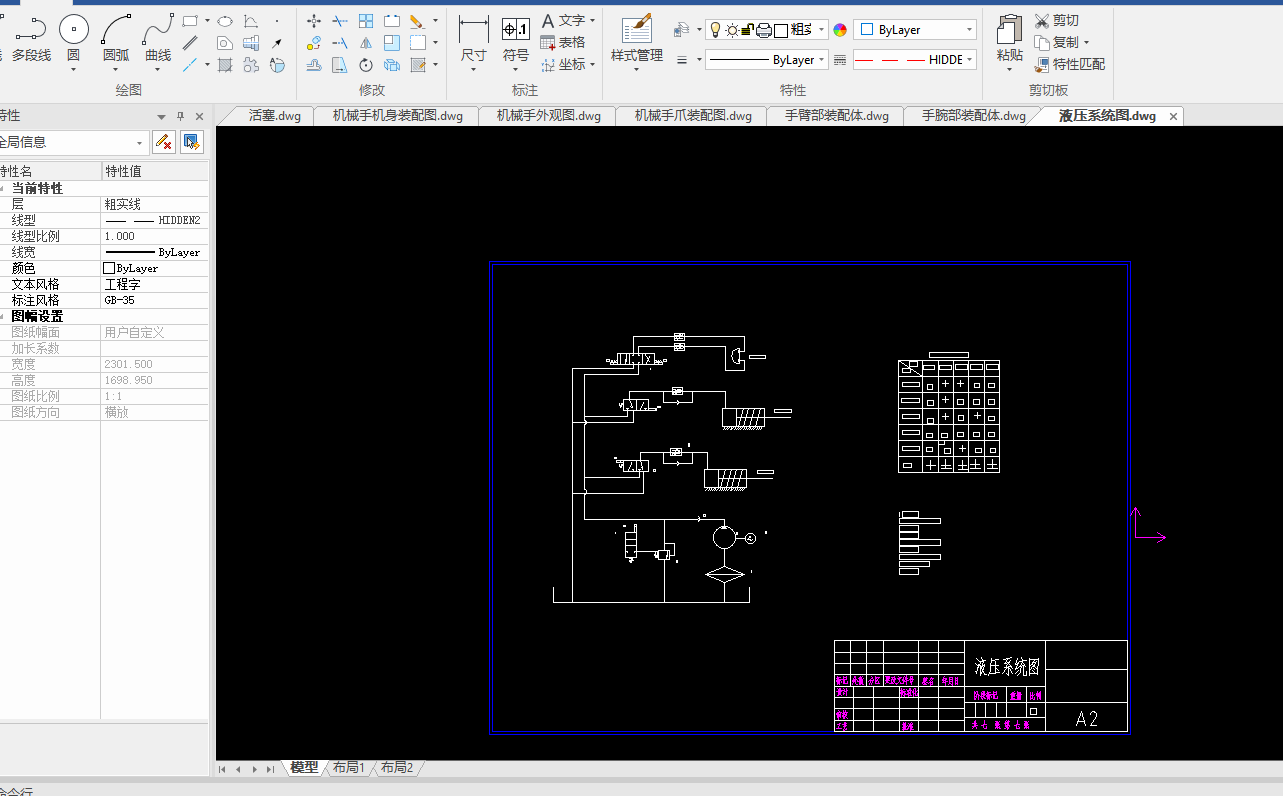
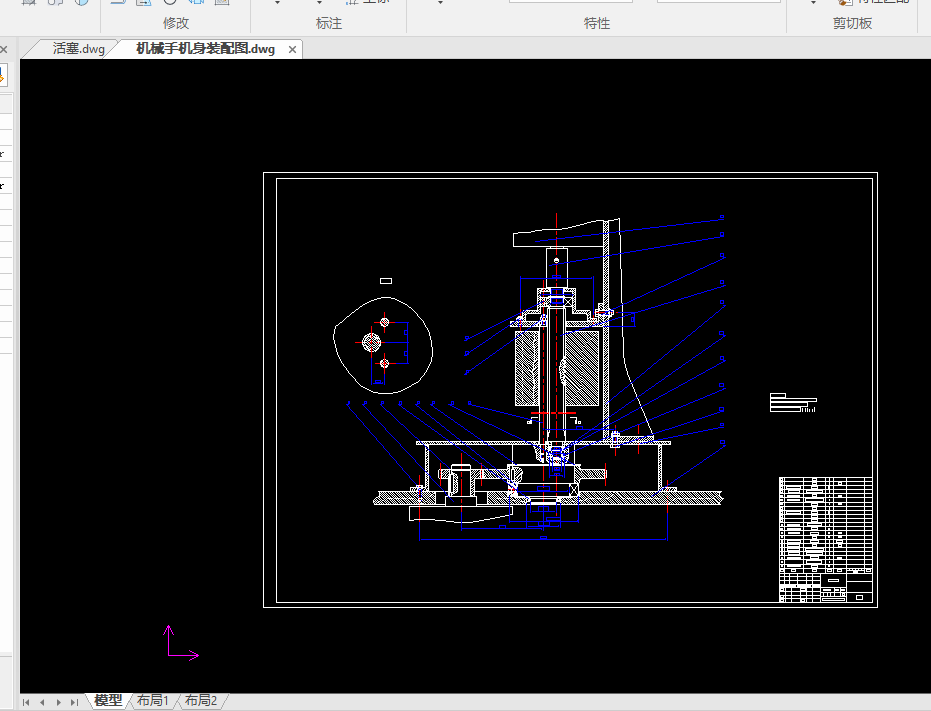
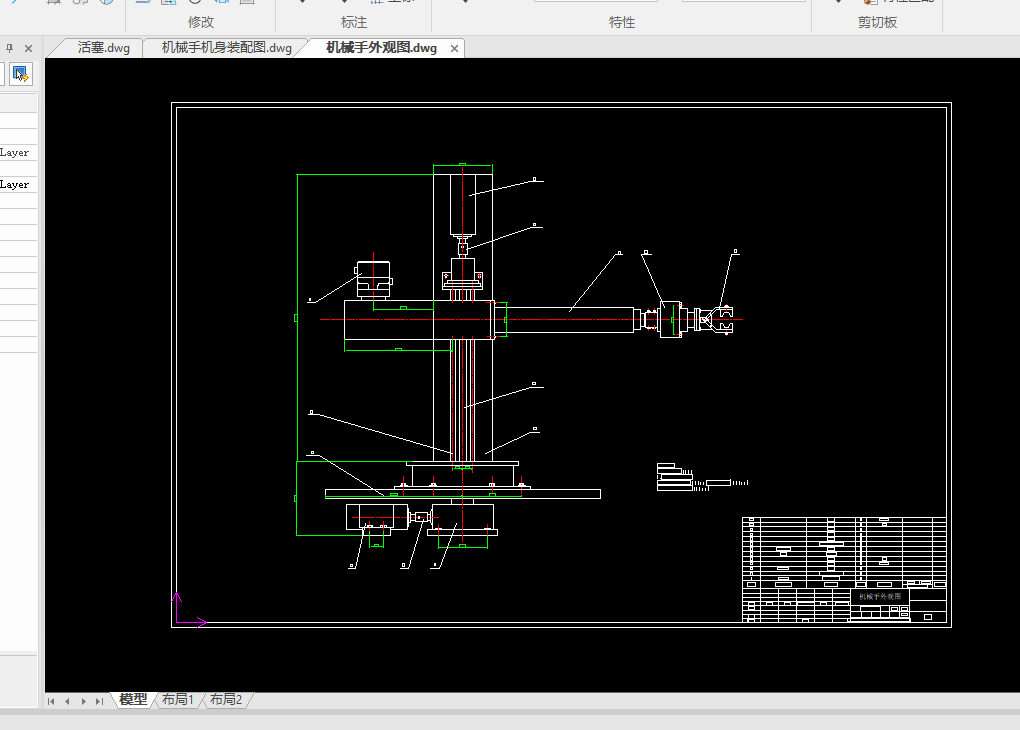
本文聚焦于智能机器人的设计与制造,重点开展了机械结构设计、传感器选择、智能算法和控制系统等方面的研究工作。在机械结构设计方面,通过对关节设计的精细化处理以及运动学分析,确保了机器人在执行任务时具备高度的灵活性和稳定性。传感器选择方面,根据机器人的应用场景和功能需求,选取了适合的传感器以实现对环境的感知和信息的获取。在智能算法和控制系统方面,基于理论分析和仿真结果,制定了高效且稳定的控制策略,实现了机器人的自主导航、路径规划以及任务执行等功能。本研究不仅为智能机器人的设计与制造提供了理论支持和实践指导,也为机器人技术的进一步发展奠定了基础。
关键词:智能机器人;机械结构设计;运动学分析;cad;Solidworks;连杆型结构
Abstract
This paper focuses on the design and manufacturing of intelligent robots, focusing on the research work of mechanical structure design, sensor selection, intelligent algorithm and control system. In terms of mechanical structure design, the fine processing and kinematic analysis of the joint design ensure that the robot has a high degree of flexibility and stability when performing tasks. In terms of sensor selection, according to the application scenarios and functional requirements of the robot, suitable sensors are selected to realize the perception of the environment and information acquisition. In terms of intelligent algorithm and control system, based on the theoretical analysis and simulation results, an efficient and stable control strategy is formulated, and the functions of autonomous navigation, path planning and task execution are realized. This study not only provides theoretical support and practical guidance for the design and manufacture of intelligent robots, but also lays a foundation for the further development of robotics.
Key words: intelligent robot; mechanical structure design; kinematic analysis; cad; Solidworks; connecting rod structure