农业信息采集机器人的设计 说明书(论文)+任务书+中期检查表+PDF图纸

农业信息采集机器人的设计
摘要
在现在信息化高度成长的时期,必需也得让农业享受信息成长的盈利,紧跟时期成长的程序。农业是我国的重中之重,农业信息的收集对农业生产者来讲有着至关重要的作用。而如今农村普遍存在着农民获取信息渠道贫乏,缺乏科学的理论指导,不能对农业的信息做出正确的反馈,农业增收面临着巨大的困难,农民的收入也无法得到提高。因此寻找一种行之有效的现代农业生产的模式―农业信息采集,对于当代农业的生产指导有着关键的影响。
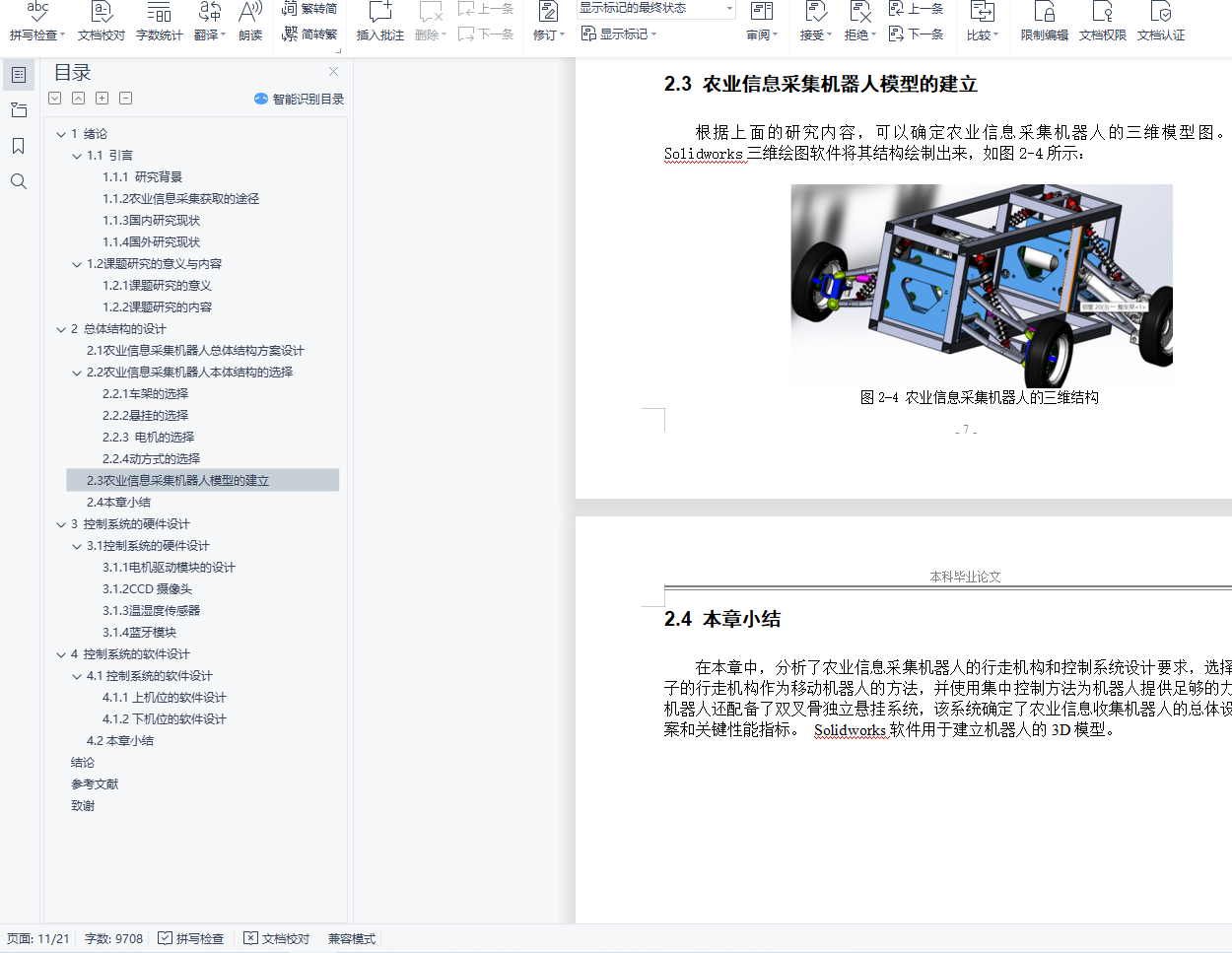
本文首先通过对我国农业信息采集相关进展的发展情况进行研究,从而得到哪些方面需要利用科学的方法去确定机器人的相关功能。通过综合考虑,确定在农业大棚里应用这种机器人,从而确定机器人的机械结构,运动方式,完成其总体框架的设计。并且利用Solidworks绘制机器人的总体框架,使其更加直观的展现出来,也更加有利于后期增删零件,便于修改。
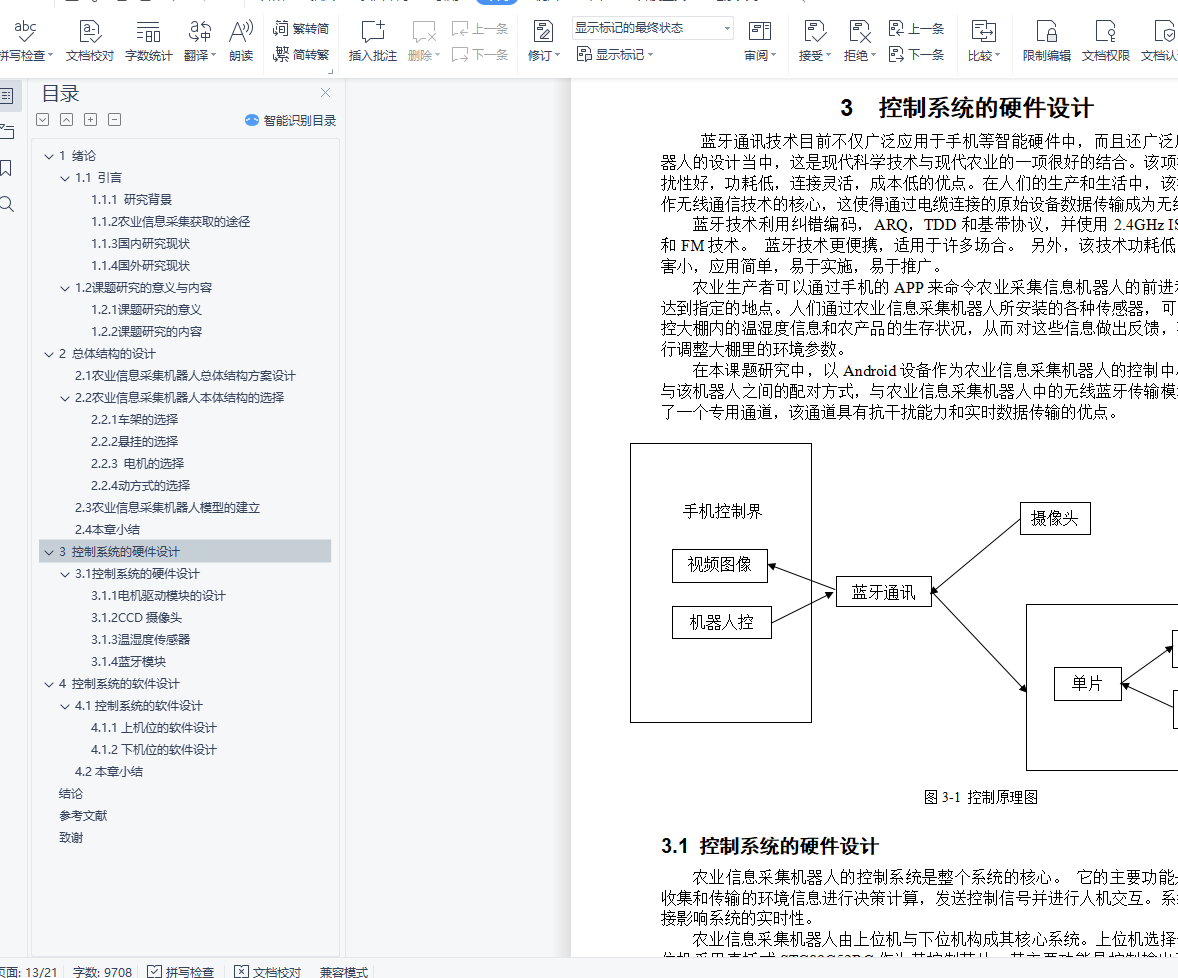
在完成农业信息采集机器人机械结构的设计后,需要对其控制系统进行一个细致的设计,该机器人是基于BLUETOOTH的机器人控制系统,需要对其控制的硬件进行一个选型,选取适合农业实际作业的情形。最后必要完成节制芯片的选择,机电的选择,电池的选择,节制器的选择。
关键词 农业信息采集;机器人;蓝牙通讯技术;
Design of Agricultural Information Collection Robot
Abstract
In the era of highly developed information technology, agriculture must also enjoy the dividends of information development and keep pace with the development of the times. Therefore, exploring an effective agricultural production model―agricultural information collection, has an important impact on agricultural production guidance.
The collection of agricultural information is an important and basic task for the agricultural sector to strengthen the functions of "economic regulation, market supervision, social management, and public services" under the conditions of a socialist market economy. The more government functions are in place, the more prominent the position of agricultural information collection; the more frequent market fluctuations, the more prominent the role of agricultural information collection; the more urgent the scientific development requirements, the more agricultural information collection needs to be strengthened. The farmland information system constructed by using wireless sensor network technology realizes the real-time collection of farmland environmental information, which is the information foundation of implementing precision agriculture.
Information is a way of thinking, and it is a way of making money. Through comprehensive consideration, the application of this robot in the agricultural greenhouse is determined, so as to determine the robot's mechanical structure and movement mode, and complete the design of its overall frame. And the use of Solidworks to draw the overall framework of the robot, so that it is more intuitive to show, but also more conducive to the addition and deletion of parts later, easy to modify.
The robot is based on the BLUETOOTH robot control system. It needs to select a type of hardware for its control and choose a situation that is suitable for agricultural actual operations. After completing these tasks, the agricultural information collection robot needs to be programmed, and the upper computer and the lower computer must be programmed.
Keywords Agricultural information collection; robot; Bluetooth technology; mechanical structure
目录
摘要
Abstract